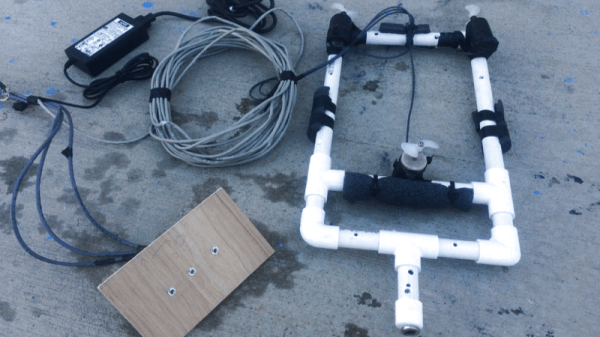
[mark.brubaker.1] and his crew decided to make a submersible for a school project using PVC pipes as a frame. It has two motors on the back to provide forward thrust and steering as well as a horizontal mounted motor in the middle of the PVC chassis to provide up and down thrust. They used regular motors which they waterproofed by inserting them inside a case full of plumbers wax. We’re not sure how long this will hold at the bottom of the ocean, but it works fine for a school project in the pool. Here’s the instructions on how to make one.
The build is completely analog, the controller is a board with three switches which individually control the different motors. So if you want to turn left, you fired up the right motor. For right you do the opposite and fire up the left motor. Up and down, well, you get the picture. If you have a swimming pool, lake or some water body nearby and you’re looking for a weekend project with your kids, this is a great tip. It’s not an Arduino controlled robot fish, but it’s a first step in that direction; you can later on use the frame to improve on the design and add some electronics.