After seeing some of the interesting clock builds we’ve featured recently, [shiura] decided to throw their hat in the ring and sent us word about their incredible 3D printed hybrid clock that combines analog and digital styles.
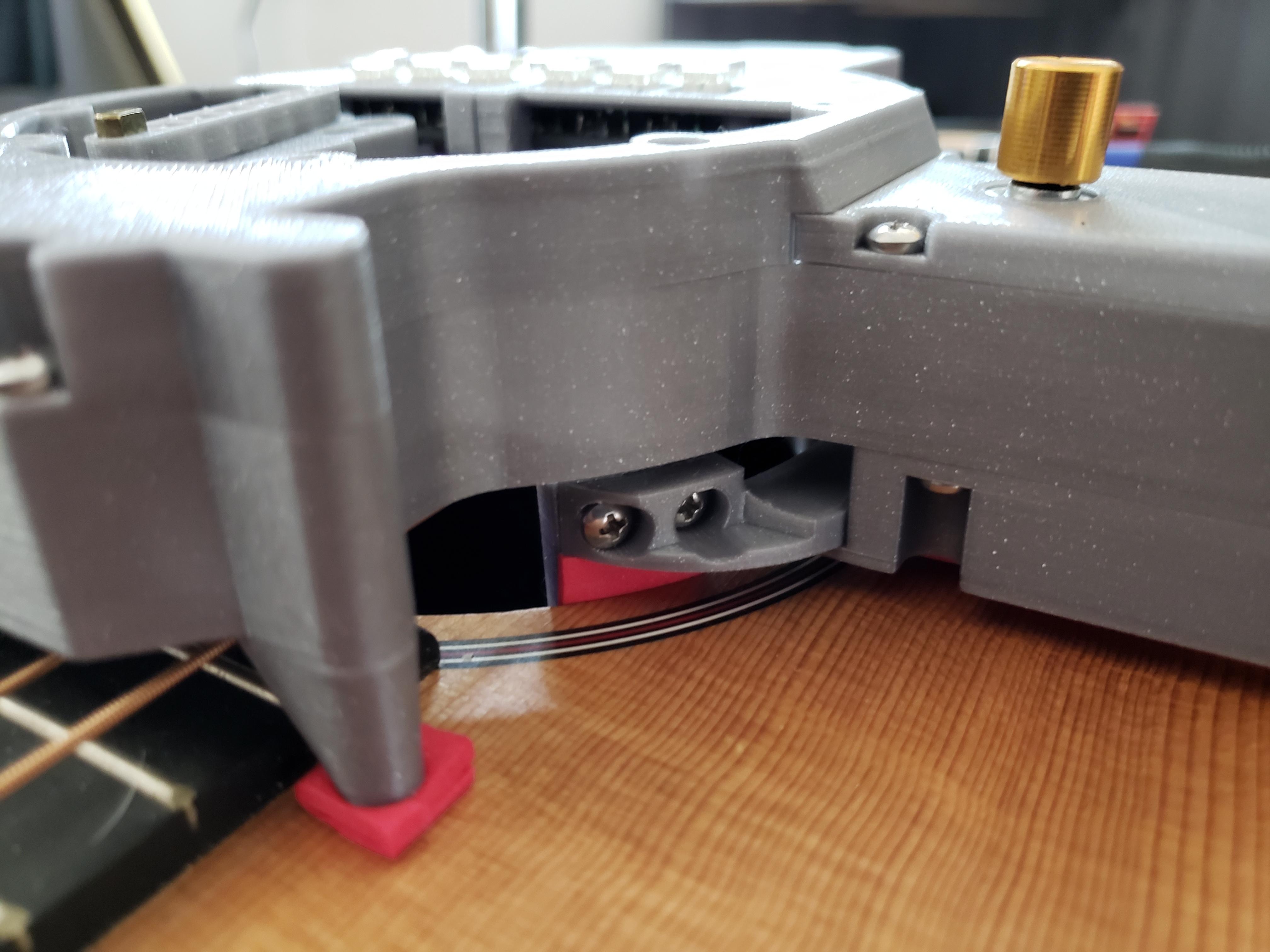
While the multiple rotating rings might look complex from the front, the ingenious design behind the mechanism is powered by a single stepper motor. Its operation is well explained in the video below, but the short version is that each ring has a hook that pushes its neighboring ring over to the next digit once it has completed a full rotation. So the rightmost ring rotates freely through 0 to 9, then flips the 10-minute ring to the next number before starting its journey again. This does mean that the minute hand on the analog display makes a leap forward every 10 minutes rather than move smoothly, but we think its a reasonable compromise.
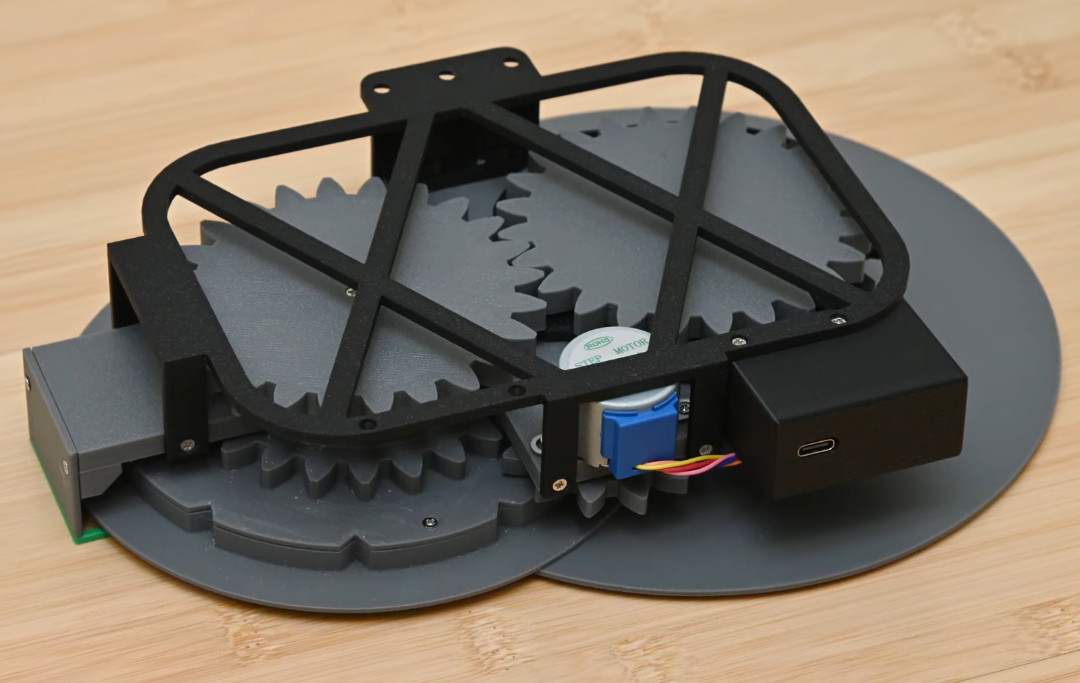 Beyond the 28BYJ-48 geared stepper motor and its driver board, the only other electronics in the build is a Seeed Studio XIAO ESP32C6 microcontroller. The WiFi-enabled MCU is able to pull the current time down from the Internet, but keep it mind it takes quite awhile for the mechanism to move all the wheels; you can see the process happen at 60x speed in the video.
Beyond the 28BYJ-48 geared stepper motor and its driver board, the only other electronics in the build is a Seeed Studio XIAO ESP32C6 microcontroller. The WiFi-enabled MCU is able to pull the current time down from the Internet, but keep it mind it takes quite awhile for the mechanism to move all the wheels; you can see the process happen at 60x speed in the video.
If you’re looking to recreate this beauty, the trickiest part of this whole build might be the 3D print itself, as the design appears to make considerable use of multi-material printing. While it’s not impossible to build the clock with a traditional printer, you’ll have to accept losing some surface detail on the face and performing some well-timed filament swaps.
[shirua] tells us they were inspired to send their timepiece in after seeing the post about the sliding clock that just went out earlier in the week.
Continue reading “Hybrid Mechanical Clock Shows It Both Ways”