Even though GPS makes it possible for us to easily navigate around the planet in almost any vehicle we’d like, whether that’s a passenger vehicle, airplane, or cargo ship, it’s not really suitable for applications that require sub-meter accuracy. For that, some specialized hardware is needed, and [GreatScott!] shows us how to do it using a small robot as a platform.
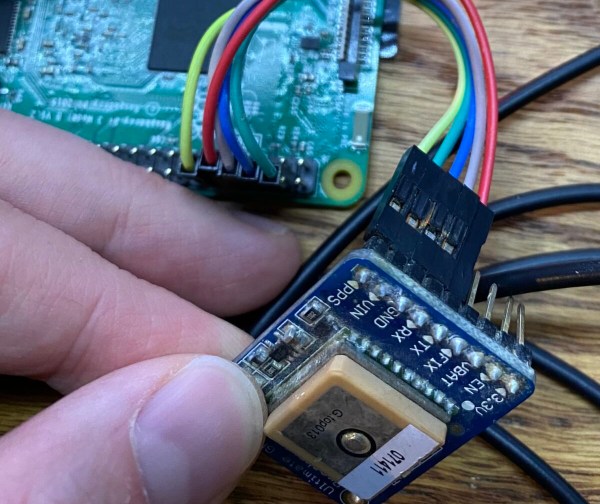
The key to extremely accurate GPS signals in this case is using a receiver that supports real-time kinematic positioning (RTK). This type of system relies on a base station with a known position communicating with local mobile receivers to increase the precision of those mobile receivers by comparing the phase angle of the received signals. Of course these modules are much more expensive than the average standard GPS receiver, but for this kind of accuracy there is always a cost.
After getting a baseline accuracy of around two meters with a standard GPS receiver, [GreatScott!] installs the RTK GPS mobile receiver on a tracked robotic platform and a base station on a fence post. With the RTK system running, the limiting factor in accuracy became the robot’s steering system, as its turning radius and steering algorithms weren’t up to the task of hitting centimeter-sized targets out of the box.
But, as a proof-of-concept, it goes to show how accurate GPS can be as long as the right hardware is used, and for practical applications is good enough to mow a lawn with a robot or even do some amateur land surveying.
Continue reading “Increasing Local GPS Accuracy For A Small Robot”