Timepieces are cool no matter how simplistic or granular they are. Sometimes its nice not to know exactly what time it is down to the second, and most of the really beautiful clocks are simple as can be. If you didn’t know this was a clock, it would still be fascinating to watch the bearings race around the face.
 This clock takes design cues from the Story clock, a visual revolution in counting down time which uses magnetic levitation to move a single bearing around the face exactly once over a duration of any length as set by the user. As a clock, it’s not very useful, so there’s a digital readout that still doesn’t justify the $800 price tag.
This clock takes design cues from the Story clock, a visual revolution in counting down time which uses magnetic levitation to move a single bearing around the face exactly once over a duration of any length as set by the user. As a clock, it’s not very useful, so there’s a digital readout that still doesn’t justify the $800 price tag.
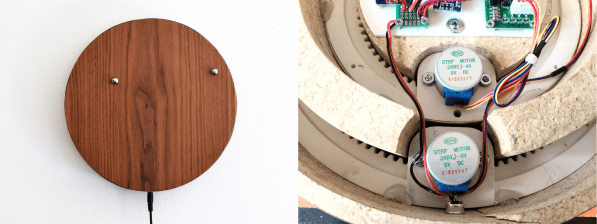
[tomatoskins] designed a DIY version that’s far more elegant. It has two ball bearings that move around the surface against hidden magnets — an hour ball and a minute ball. Inside there’s a pair of 3D-printed ring gears that are each driven by a stepper motor and controlled with an Arduino Nano and a real-time clock module. The body is made of plywood reclaimed from a bed frame, and [tomatoskins] added a walnut veneer for timeless class.
In addition to the code, STLs, and CAD files that birthed the STLs, [tomatoskins] has a juicy 3D-printing tip to offer. The gears had to be printed in interlocked pieces, but these seams can be sealed with a solution of acetone and plastic from supports and failed prints.
If you dig minimalism but think this clock is a bit too vague to read, here’s a huge digital clock made from small analog clocks.

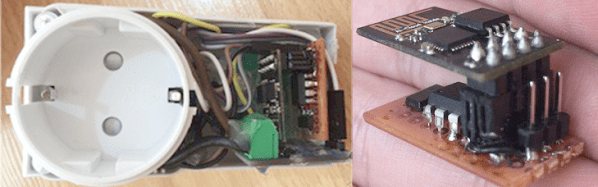
 After contemplating a few solutions, he opted for one which wouldn’t offend the coffee gods. The machines use a high current to produce their heat, so he adapted some old remote control power sockets for the machines to plug into which would now monitor the current. A high current means the coffee is brewing and he knew that brewing takes one minute per cup, so the duration of the high current tells him the number of cups.
After contemplating a few solutions, he opted for one which wouldn’t offend the coffee gods. The machines use a high current to produce their heat, so he adapted some old remote control power sockets for the machines to plug into which would now monitor the current. A high current means the coffee is brewing and he knew that brewing takes one minute per cup, so the duration of the high current tells him the number of cups.