Energy cannot be created or destroyed, but the most likely eventual conclusion of changing it from one form or another will be relatively useless heat. For those that workout with certain gym equipment, the change from chemical energy to heat is direct and completely wasted for anything other than keeping in shape. [Oliver] wanted to add a step in the middle to recover some of this energy, though, and built some gym equipment with a built-in generator.
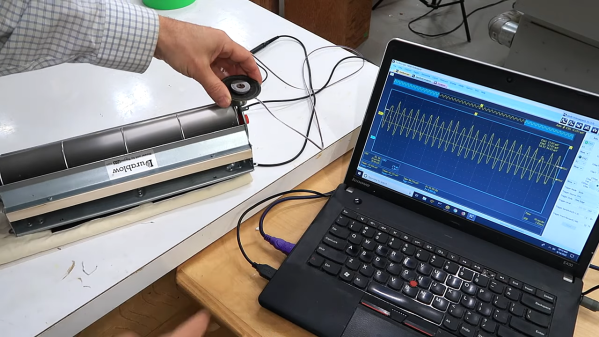
Right now he has started with the obvious exercise bike stand, which lends itself to being converted to a generator quite easily. It already had a fairly rudimentary motor-like apparatus in it in order to provide mechanical resistance, so at first glance it seems like simply adding some wires in the right spots would net some energy output. This didn’t turn out to be quite so easy, but after a couple of attempts [Oliver] was able to get a trickle of energy out to charge a phone, and with some more in-depth tinkering on the motor he finally was able to get a more usable amount of energy to even charge a laptop.
He estimates around 30 watts of power can be produced with this setup, which is not bad for a motor that was never designed for anything other than mechanical resistance. We look forward to seeing some other equipment converted to produce energy too, like a rowing machine or treadmill. Or, maybe take a different route and tie the exercise equipment into the Internet connection instead.