Normally when we run across a project that claims to be overengineered, we admit that we get a little excited. Such projects always hold the potential for entertainingly over-the-top designs, materials, and methods. In this case, though, we’ll respectfully disagree with [Zach Hipps] assessment of his remote-controlled soda bottle rocket launcher as “overengineered”. To us, it seems just right.
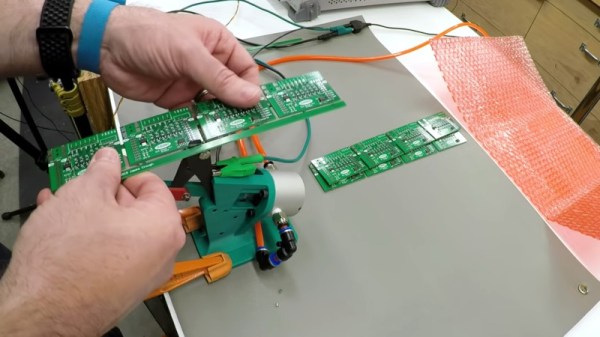
That’s not to take away from anything accomplished with this build. Indeed, we’re mighty impressed by the completeness of the build, which was intended to create a station for charging and launching air-powered water rockets. The process started with a prototype, built mainly from 3D-printed parts but with a fair selection of workshop scraps to hold it together. This allowed [Zach] to test the geometry of the parts, operation of the mechanism, and how it interfaced with the flange on the necks of 2-liter soda bottles.
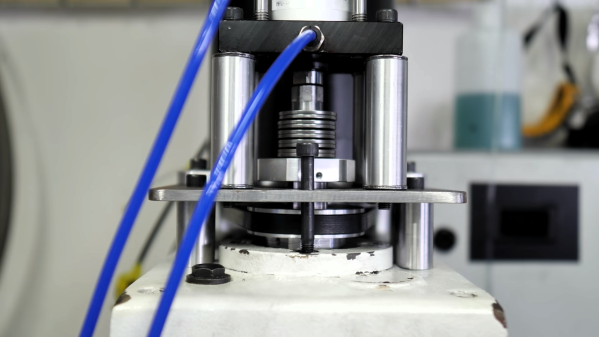
Honestly, the prototype was pretty good by itself and is probably where many of us would have stopped, but [Zach] kept going. He turned most of the printed parts into machined aluminum and Delrin, making for a very robust pneumatically operated stand. We’ve got to say the force with which the jaws close around the bottle flange is a bit scary — looks like it could easily clip off a wayward finger. But if he manages to avoid that fate, such a hearty rig should keep [Zach] flying for a long time. Perhaps it could even launch a two-stage water rocket?
Continue reading “Robust Water-Rocket Launcher Gets The Engineering Just Right”