The inspiration for [K.C. Lee]’s project for The Hackaday Prize didn’t come from seeing a grave injustice or inhuman suffering. He was watching Daredevil on Netflix. A show about a blind guy who fights crime in his spare time. People don’t have superhuman senses, and radioactive material falling off a truck in New York City leads to Ninja Turtles, not superheros. Still, a crude form of echolocation is well within the reach of the a capable hacker and would be very useful for those who are legally blind.
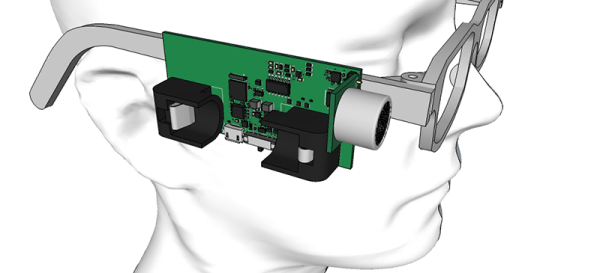
[K.C.]’s idea for human echolocation is a small wearable with ultrasonic sensors, 6DOF IMUs, and audio and haptic feedback. With a bit of math and a lot of practice, it’s possible to walk down a hallway, avoid obstacles, and find your way around without sight.
Human echolocation is a real thing, and it’s great to see a device that makes this minor human superpower a little more accessible. [K.C.] says there are 40 million people world wide that could use a device like this, and for an idea that was inspired by a superhero on TV, it’s one of the more interesting inspirations for an entry to The Hackaday Prize.