The judges’ ballots are in and we’re proud to present the ten winners of the fourth round of the 2021 Hackaday Prize. We love robots, and it’s obvious that you do too! The number and range of projects submitted this year were overwhelming.
No robotics round is complete without a robot arm, and while a few of them were in the finals, we especially liked CM6, which really pulled out all the stops. This is research-grade robotics on a not-quite-student budget, featuring custom compliant mechanisms so that it can play well with its fleshy companions.
With six degrees of freedom, and six motors, the drivetrain budget can quickly get out of hand on builds like these, so we’re especially happy to see custom, open, brushless-motor driver boards used to reduce the cost of admission. Even if you’re not going to make a 100% faithful CM6 clone, you’ll learn a lot just from going through the build. Oh, and did we mention it has a software stack? Continue reading “Meet The Winners Of The Hackaday Prize Round Four: Redefine Robots”→
Hermit crabs are famous for being small critters that, from time to time throughout their lives, abandon one shell carried on their back to pick up a new one. Project HERMITS by [Ken Nakagaki] is inspired by this very concept, and involves table-top robots that dock with a variety of modules with different mechanical mechanisms.
As shown in the project video, the small robots augment themselves by interfacing with attachments referred to as “mechanical shells.” They variously allow the robot to move differently or interact in a new way with the world.
One shell allows the robot to activate a small fan, while another lets it rotate arrows in various directions. others let robots work together to actuate a bigger mechanical assembly like a gripper or a haptic feedback joystick.
A particularly cute example is the “lift shell” which allows one little robot give another one a boost in height. Another series of shells allows the robots to play the role of various characters in a performance of Alice in Wonderland.
The technology is all built around Sony’s tiny two-wheeled toio robots, but adds a vertical actuator to the platform that lets the robots actively dock with a variety of shell designs. It’s an involved hack, but key to the whole enterprise. The individual bots are all controlled by Raspberry Pis communicating over Bluetooth.
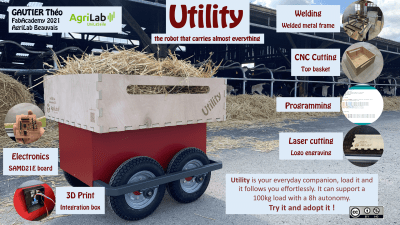
[Théo Gautier] thought that a human-following utility trailer would be helpful for people working on farms. He didn’t just think about it, however, he designed and built it as a final project at the Agrilab FabAcademy at the University UniLasalle Polytechnique in northern France. He took the idea from concept to fruition in six weeks.
His build log documents the project very well, and takes you through his design choices and their implementation. The brains of the cart are a SAMD21E board that he made himself, and its sensory perception of the world is provided by HC-SR04 ultrasonic sensors and a PixyCam 2. Locomotion is provided by four each 100W DC motor / gearbox assemblies. He’s put a lot of effort into the construction process and posted a lot of photos of the intermediate steps. One piece of advice that caught our eye was to measure the diagonals of your frame repeatedly when welding it together — things can and do shift around. If you don’t, you may have to rectify the mistake like [Théo] did, with a big hammer.
You’re hit by the global IC shortage, reduced to using stone knives and bearskins, but you still want to make something neat? It’s time to revisit BEAM robots.
Biology, electronics, aesthetics, and mechanics — Mark Tilden came up with the idea of minimalist electronic creatures that, through inter-coupled weak control systems and clever mechanical setups, could mimic living bugs. And that’s not so crazy if you think about how many nerves something like a cockroach or an earthworm have. Yet their collection of sensors, motors, and skeletons makes for some pretty interesting behavior.
My favorite BEAM bots have always been the solar-powered ones. They move slowly or infrequently, but also inexorably, under solar power. In that way, they’re the most “alive”. Part of the design trick is to make sure they stay near their food (the sun) and don’t get stuck. One of my favorite styles is the “photovore” or “photopopper”, because they provide amazing bang for the buck.
Back in the heyday of BEAM, maybe 15 years ago, solar cells were inefficient and expensive, circuits for using their small current were leaky, and small motors were tricky to come by. Nowadays, that’s all changed. Power harvesting circuits leak only nano-amps, and low-voltage MOSFETs can switch almost losslessly. Is it time to revisit the BEAM principles? I’d wager you’d put the old guard to shame, and you won’t even need any of those newfangled microcontroller thingies, which are out of stock anyway.
This article is part of the Hackaday.com newsletter, delivered every seven days for each of the last 200+ weeks. It also includes our favorite articles from the last seven days that you can see on the web version of the newsletter.
Want this type of article to hit your inbox every Friday morning? You should sign up!
If you’ve been following the Boston Dynamics project Spot, you’ve seen its capabilities and how we’re starting to see it being used in public more since its official release last year. But in a true display of how hobbyist electronics have been evolving and catching up with the big companies over the past few years, [Miguel Ayuso Parrilla] shows us his own take on the walking robot with CHOP, one of the finalists in this year’s Hackaday Prize.
Running the show are two main components, a Raspberry Pi 4B and an Arduino Mega. While the Mega interfaces with the servo controllers and provides filtering for sensors like the inertial measurement unit, the Pi takes all that data in and uses a series of Python scripts in order to determine the gait of the robot and which way the servos should move through an inverse kinematics model. To control the direction in which the body of the robot should accelerate, a Bluetooth remote controller sends commands to the Raspberry Pi.
We’re excited to see home-grown projects rise to this level of complexity, which would be mostly unheard of a few years ago in the maker scene, and only presented by large tech companies with tons of money to spend on research and development. There are other quadruped robots to inspire yourself on than Spot though, like this one with a spherical design and fold-out legs. Check this one in action after the break.
[Stevej52] likes to build things you can’t buy, and this Jetson Nano robot falls well within that category. Reading the project details, you might think [Stevej52] drinks too much coffee. But we think he is just excited to have successfully pulled off the Herculean task of integrating over a dozen hardware and software modules. Very briefly, he is running Ubuntu and ROS on the PC and Nano. It is all tied together with Python code, and is using Modbus over IP to solve a problem getting joystick data to the Nano. We like it when existing, standard protocols can be used because it frees the designer to focus more on the application. Modbus has been around for 40 years, has widespread support in many languages and platforms.
This is an ongoing project, and we look forward to seeing more updates and especially more video of it in action like the one found below. With the recent release of a price-reduced Jetson Nano, which we covered last week, this might be an excellent project to take on.
In the fast food industry, speed is everything. The concept has never just been about cooking quickly. Players in this competitive space spend huge fortunes every year on optimizing every aspect of the experience, from ordering, to queueing, to cleaning up afterwards. And while fast food restaurants are major employers worldwide, there’s always been a firm eye cast over the gains that automation has to offer.
Flipping Burgers
In the West, fast food most commonly brings burgers to mind. Preparing a quality burger requires attention to the grade of meat, fat content, as well as the preparation steps before it hits the grill. Then it’s all about temperature and time, and getting just the right sear to bring out the natural flavors of the beef. While a boutique burger joint will employ a skilled worker to get things just right, that doesn’t fly for fast food. Every order needs to be preparable by whichever minimum-wage worker got the shift, and be as repeatable as possible across entire countries, or even the world, to meet customer expectations.
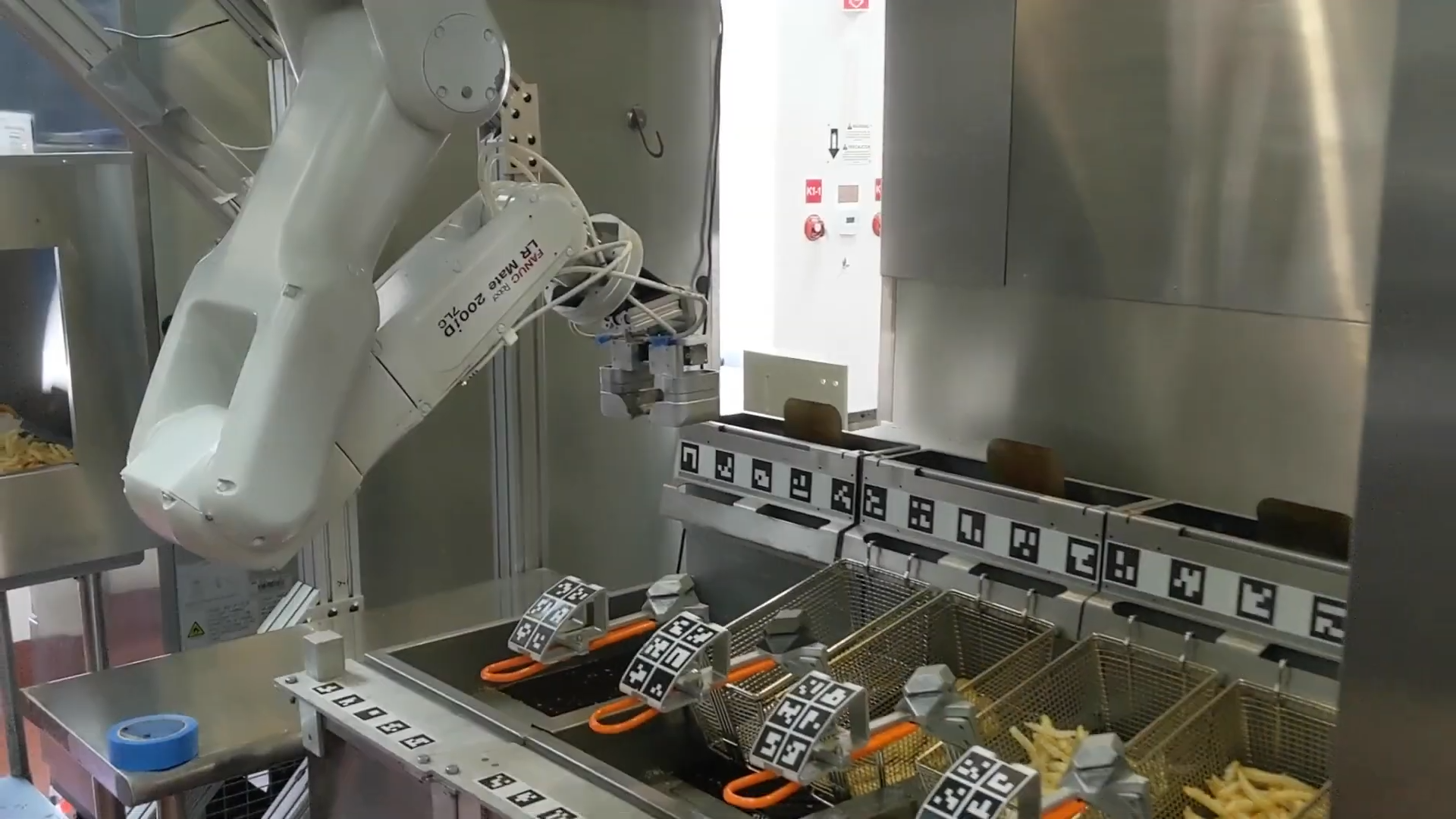
Flippy ROAR (Robot On A Rail) at work on the fryers in a White Castle in Chicago.
In their efforts to improve efficiency, White Castle have taken the bold step of installing a robotic burger flipper, imaginitively named Flippy. Built by Miso Robotics, the robot hangs from a ceiling rail to minimise the space taken up in the kitchen area. Based on a Fanuc robot arm, the system uses artificial intelligence to manage kitchen resources, Flippy is capable of managing both the grill and fryers together to ensure fries don’t get cold while the burgers are still cooking, for example. Currently undergoing a trial run in Chicago, White Castle has ambitions to roll the technology out to further stores if successful.
We’ve seen other robotic burger systems before, too. In late 2018, our own [Brian Benchoff] went down to check out Creator, which cooks and assembles its burgers entirely by machine. Despite suspicions about the business model, Creator have persisted until the present day with their unique blend of technology and culinary arts. Particularly impressive were their restaurant modifications in the face of COVID-19. The restaurant received an overhaul, with meals being robotically prepared directly in a take-out box with no human contact. Take-out meals are double-bagged and passed to customers through an airlock, with a positive-pressure system in the restaurant to protect staff from the outside world.
Pizzabots
Pizza is a staple food for many, with high demand and a stronger dependence on delivery than other fast food options. This has led to the industry exploring many avenues for automation, from preparation to order fulfillment.
In terms of outright throughput, Zume were a startup that led the charge. Their system involves multiple robots to knead dough, apply sauce and place the pie in the oven. Due to the variable nature sizes and shapes of various toppings, these are still applied by humans in the loop. Capable of turning out 120 pizzas per hour, a single facility could compete with many traditional human-staffed pizza shops. They also experimented with kitchens-on-wheels that use predictive algorithms to stock out trucks that cook pizzas on the way to the customer’s door. Unfortunately, despite a one-time $4 billion USD valuation, the startup hit a rocky patch and is now focusing on packaging instead.
Picnic aim to make lots of pizza, fast. Their business model involves working directly with existing restaurants, rather than creating their own fast-food brand from scratch.
Picnic have gone further, claiming an output rate of up to 300 twelve-inch pies an hour. The startup aims to work with a variety of existing pizza restaurants, rather than striking out as their own brand. One hurdle to overcome is the delivery of a prepared pizza into the oven. There are many varieties and kinds of pizza oven used in commercial settings, and different loading techniques are required for each. This remains an active area of development for the company. The company has a strong focus on the emerging ghost kitchen model, where restaurants are built solely to fulfill online delivery orders, with no dining area.
Domino’s is one of the largest pizza companies in the world, and thus far have focused their efforts on autonomous delivery. The DRU, or Domino’s Robotic Unit, was launched to much fanfare, promising to deliver pizzas by a small wheeled robotic unit. Equipped with sensors to avoid obstacles and GPS navigation, the project has not entered mainstream service just yet. However, between this and the multitude of companies exploring drone delivery, expect to see this become more of a thing in coming years.
Despite the marketing sizzle, the DOM Pizza Checker does not project holograms.
A more immediate innovation from Domino’s has been the DOM Pizza Checker. With customer complaints about pizza quality plaguing the chain, the pizza checker is an AI-powered visual system. It’s responsible for determining if the correct pizza has been made, with the right toppings and good distribution. An impressive practical use of AI imaging technology, it sounds an alarm if the pizza isn’t up to scratch, prompting it to be remade. However, it has come under scrutiny as a potential method to harass franchisees and workers. Additionally, the limitations of the system mean that Domino’s are still perfectly capable of turning out a bad pizza on occasion.
Other Efforts
One of the most visible examples of fast food automation is the widespread adoption of order kiosks by McDonalds, which kicked off in earnest in 2015. The majority of stores in the US now rely on these to speed up the ordering process, while also enabling more customization for customers with less fuss. Over-the-counter ordering is still possible at most locations, but there’s a heavy emphasis on using the new system.
McDonald’s automated beverage dispenser will be a familiar sight to many. Considered a great help when it works, and a great hindrance when it jams, spills, or simply shuts down.
In general, online ordering and delivery has become the norm, where ten years ago, the idea of getting McDonalds delivered was considered magical and arcane. This writer made seven attempts to take advantage of an early version of the service in China in 2015, succeeding only once, largely due to a lack of understanding of addresses written in non-Latin characters. However, due to the now-ubiquitous nature of services like Ubereats, Postmates, and Menulog, it’s simple for any restaurant to largely automate their ordering and fulfillment process, and reach customers at a distance from their brick-and-mortar locations.
Other efforts are smaller in scope, but contribute to great efficiency gains back-of-house. McDonalds and other chains have widely adopted automated beverage systems. Capable of automatically dispensing cups and the requisite fluids, they take instructions directly from the digital ordering system and take the manual labor out of drink preparation. They’re also great at slightly underfilling the cups, in a way that any human would consider incredibly rude.
Conclusion
Robots in the fast-food kitchen stand to reduce or eliminate tedious, repetitive work. Robots don’t get sick, and less human labour means fewer rostering hassles. It seems to be a foregone conclusion that more automation is on the way, and while some startups may falter, others will surely succeed. Your next meal may just yet be entirely prepared by a robot, even if it’s still delivered by a tired grad student on a moped. Come what may!