It took a long time, but it’s 2019, and we’re starting to get used to the concept of talking to a computer to make it control things around the house. It’s not quite as cool as it seemed when we saw it in films way back when, but that’s just real life. The problem is, there’s a multitude of different systems and standards and they don’t all necessarily work together. In [Blake]’s case, the problem is that Woods brand hardware only works with Amazon Alexa, which simply won’t do.
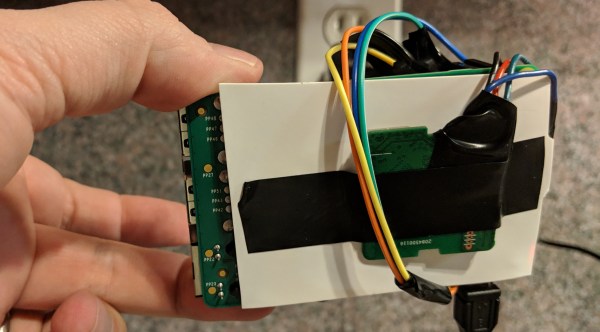
[Blake] went through the hassle of getting an Amazon Alexa compatible WiFi outlet to work with Google Assistant. It’s a bit of a roundabout way of doing things, but it works. A TP-Link HS-105 WiFi plug is used, which can be controlled through Google Assistant voice commands. The part consists of two PCBs – a control board that speaks WiFi, and a switching board with relays. [Blake] used the control board and hooked it up to a Raspberry Pi. When switched on by a command from Google, the HS-105 sets a pin high, which is detected by the Raspberry Pi. The Raspberry Pi then runs a software implementation of the KAB protocol used by the Woods hardware, triggering it when it receives the signal from the TP-Link hardware.
If we understand correctly, [Blake] had to go to this trouble in order to make his special outdoor-rated outlets work with his Google Home setup. Hopefully interoperability improves in years to come, but we won’t hold our breath.
We’ve seen some pretty convoluted projects in this space before, often using IFTTT — like this ESP8266 voice controlled tank.


![Not much use against a small and mostly plastic multirotor. Sixflashphoto [CC BY-SA 4.0]](https://hackaday.com/wp-content/uploads/2018/12/788px-KCMH_Radar.jpg)

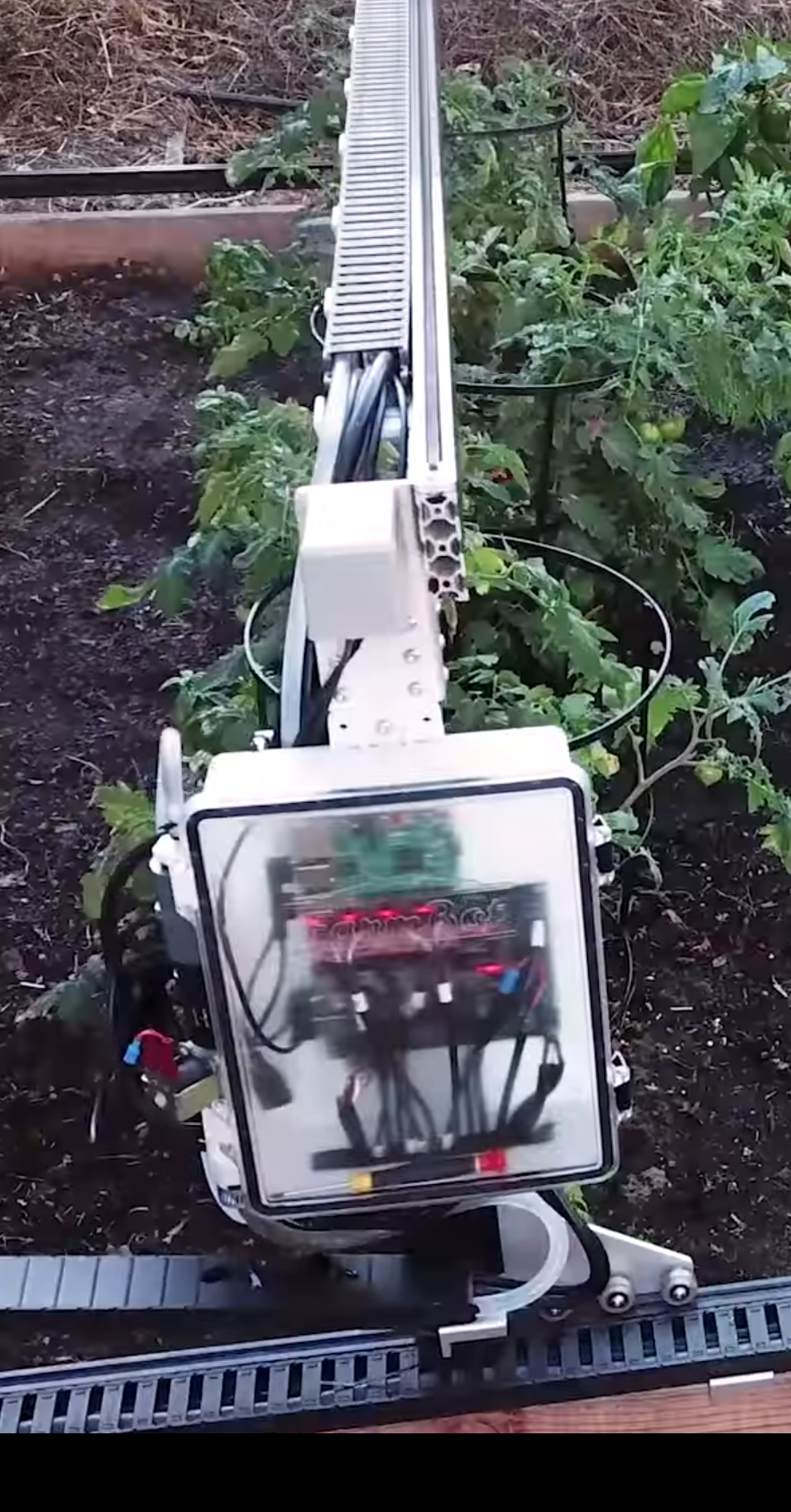 Years ago the first and second Hackaday Prizes captured an entrant named FarmBot whose goal was to build open source robotic farming equipment to make it easier for anyone to grow their own food. A few successful Kickstarters and years later they’ve been shipped multiple versions of the Genesis and Genesis XL robotic farming system and have a sustainable business! And now they’ve decided to open source their
Years ago the first and second Hackaday Prizes captured an entrant named FarmBot whose goal was to build open source robotic farming equipment to make it easier for anyone to grow their own food. A few successful Kickstarters and years later they’ve been shipped multiple versions of the Genesis and Genesis XL robotic farming system and have a sustainable business! And now they’ve decided to open source their