We’ve all played some variant of that simple old racing video game. It’s the one that involves swerving around cars in front without crashing, as the pace steadily increases further. [Dr. Engine] has recreated that very game in the physical world, with the help of LEGO Technic.
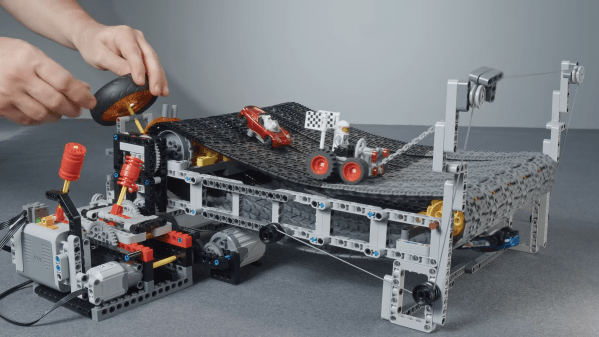
The design uses what appears to be a LEGO tank tread to create a treadmill for a LEGO car. The initial design is hand-cranked, but [Dr. Engine] soon upgrades this with a motor. The wide treadmill is then fitted with a steering wheel. This steers the car laterally along the treadmill via a simple pulley system. From there, it was a simple job of adding gearbox to change the speed of the treadmill, and obstacles for the car to dodge. Double-sided table affixed small die-cast cars to the track to fit the theme of the build.
It’s great fun watching the car buck and weave over the undulating track, and we’d certainly love to compete with friends for the high score. We’ve seen similar builds before, too, like this all-LEGO suspension dyno. Video after the break.
Continue reading “LEGO Race Car Simulator Is Like A Mechanical Arcade Game”

















