No doubt many Hackaday readers will have tried their hand at home brewing. It’s easy enough, you can start with a can of hopped malt extract and a bag of sugar in a large bucket in your kitchen and achieve a decent enough result. Of course, once you get the taste it’s a field of infinite possibilities, so many enthusiasts go further into the realm of beer making with specialty ingredients and carefully controlled mash tuns.
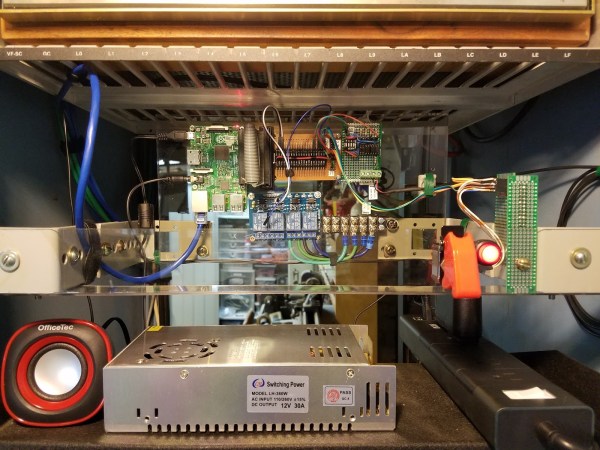
Such an inductee into the brewery arts is [Christopher Aedo], who has documented his automated brewing system driven by a Raspberry Pi running CraftBeerPi. And it’s an impressive setup, with boil kettle, mash tun, and heat exchanger, a 5KW heating element, and all associated valves, pipes, pumps, and sensors. This ensures consistency and fine control over temperature over the long-term at all stages of the brew, something that would be very difficult to achieve manually at this scale.
The whole brewery is mounted on a cart for portability and has been used for a lot of brew cycles of many different styles. We can’t help a touch of envy at the array of beer taps in his kitchen.
Over the years we’ve brought you a few brewing projects. Another Pi-based setup graced these pages in 2012, as did a brewery using a Lego Mindstorms controller. Top marks go though to the brewer who fought his beer belly through brewing machinery powered by an exercise bike.
Via Recantha.