While the days of outdoor cookouts may be a few months away for most of us, that certainly leaves plenty of time to prepare for that moment. While some may spend that time perfecting recipies or doing various home improvement projects during their remaining isolation time, others are practicing their skills at the various games played at these events. Specifically, this group from [Dave’s Armory] which have trained a robot that helps play the perfect game of cornhole. (Video, embedded below.)
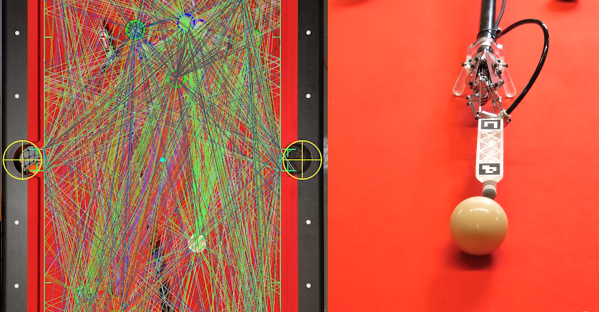
While the robot in question is an industrial-grade KUKA KR-20 robot with a hefty price tag of $32,000 USD, the software and control system that the group built are fairly accessible for most people. The computer vision is handled by an Nvidia Jetson board, a single-board computer with extra parallel computing abilities, which runs OpenCV. With this setup and a custom hand for holding the corn bags, as well as a decent amount of training, the software is easily able to identify the cornhole board and instruct the robot to play a perfect game.
While we don’t all have expensive industrial robots sitting around in our junk drawer, the use of OpenCV and an accessible computer might make this project a useful introduction to anyone interested in computer vision, and the group made the code public on their GitHub page. OpenCV can be used for a lot of other things besides robotics as well, such as identifying weeds in a field or using a Raspberry Pi for facial recognition.
Continue reading “Cheat At Cornhole With A Bazillion-Dollar Robot”