GPS has been a game-changing technology for all kinds of areas. Shipping, navigation, and even synchronization of clocks have become tremendously easier thanks to GPS. As a result of its widespread use, the cost of components is also low enough that almost anyone can build their own GPS device, and [Akio Sato] has taken this to the extreme with efforts to build a GPS tracker that uses the tiniest amount of power.
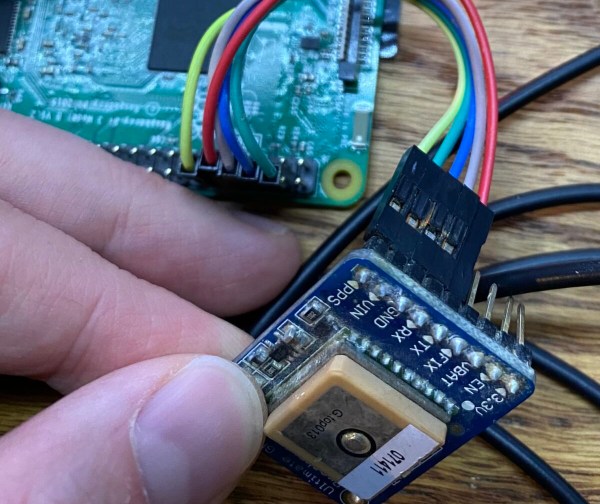
This GPS tracker is just the first part of this build, known as the air station. It uses a few tricks in order to get up to 30 days of use out of a single coin cell battery. First, it is extremely small and uses a minimum of components. Second, it uses LoRa, a low-power radio networking method, to communicate its location to the second part of this build, the ground station. The air station grabs GPS information and sends it over LoRa networks to the ground station which means it doesn’t need a cellular connection to operate, and everything is bundled together in a waterproof, shock-resistant durable case.
[Akio Sato] imagines this unit would be particularly useful for recovering drones or other small aircraft that can easily get themselves lost. He’s started a crowdfunding page for it as well. With such a long battery life, it’s almost certain that the operator could recover their vessel before the batteries run out of energy. It could also be put to use tracking things that have a tendency to get stolen.


![[Nick Rehm] explains the workings of a gps-less self guided drone](https://hackaday.com/wp-content/uploads/2021/10/gpsless-drone-featured.jpg?w=600&h=450)