 [madcowswe] starts by pointing out that the entire premise of ODrive (an open-source brushless motor driver board) is to make use of inexpensive brushless motors in industrial-type applications. This usually means using hobby electric aircraft motors, but robotic applications sometimes need more torque than those motors can provide. Adding a gearbox is one option, but there is another: so-called “hoverboard” motors are common and offer a frankly outstanding torque-to-price ratio.
[madcowswe] starts by pointing out that the entire premise of ODrive (an open-source brushless motor driver board) is to make use of inexpensive brushless motors in industrial-type applications. This usually means using hobby electric aircraft motors, but robotic applications sometimes need more torque than those motors can provide. Adding a gearbox is one option, but there is another: so-called “hoverboard” motors are common and offer a frankly outstanding torque-to-price ratio.
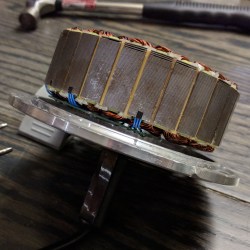
A teardown showed that the necessary mechanical and electrical interfacing look to be worth a try, so prototyping has begun. These motors are really designed for spinning a tire on the ground instead of driving other loads, but [madcowswe] believes that by adding an encoder and the right fixtures, these motors could form the basis of an excellent robot arm. The ODrive project was a contender for the 2016 Hackaday Prize and we can’t wait to see where this ends up.

 We have to admit that we raised a wary eyebrow as we first watched [MakerMan]’s video below. We thought it was going to be just another hoverboard hack at first, but as we watched, there were some pretty impressive fabrication skills on display. Yes, the project does start with tearing into a defunct hoverboard for parts, primarily one wheel motor and the battery pack. But after that, [MakerMan] took off on a metalworking tear. Parts of the hoverboard chassis were attached to a frame built from solid bar stock — we’ll admit never having seen curves fabricated in quite that way before. The dead 18650 in the battery pack was identified and replaced, and a controller from an e-bike was wired up. Fitted with a thumb throttle and with a bit of padding on the crossbar, it’s almost a ride-upon but not quite. It seems to move along at quite a clip, even making allowances for the time-compression on the video.
We have to admit that we raised a wary eyebrow as we first watched [MakerMan]’s video below. We thought it was going to be just another hoverboard hack at first, but as we watched, there were some pretty impressive fabrication skills on display. Yes, the project does start with tearing into a defunct hoverboard for parts, primarily one wheel motor and the battery pack. But after that, [MakerMan] took off on a metalworking tear. Parts of the hoverboard chassis were attached to a frame built from solid bar stock — we’ll admit never having seen curves fabricated in quite that way before. The dead 18650 in the battery pack was identified and replaced, and a controller from an e-bike was wired up. Fitted with a thumb throttle and with a bit of padding on the crossbar, it’s almost a ride-upon but not quite. It seems to move along at quite a clip, even making allowances for the time-compression on the video.