A great addition to a home shop is a bandsaw, but when [Design Prototype Test] got a well-used one, he found it wasn’t in very good shape. The previous owner put in an underpowered motor and made some modifications to accommodate the odd-sized blade. Luckily, 3D printing allowed him to restore the old saw to good working order.
There were several 3D printed additions. A pulley, a strain relief, and even an emergency stop switch. Honestly, none of this stuff was something you couldn’t buy, but as he points out, it was cheaper and faster than shipping things in from China. He did wind up replacing the initial pulley with a commercial variant and he explains why.
For a recent event, [MakerMan] was tasked with creating an interactive display that could move back and forth along an image of the Moscow skyline to highlight different points of interest. The end result is certainly gorgeous, but since this is Hackaday, we were more excited to see all the behind the scenes video of how it was built.
As with many of his projects, this one started with little more than scrap parts. Two metal I-beams were welded together to make a track, and a wheeled cart was fashioned to ride on it. Using a belt and pulley system that’s not unlike a scaled up version of what you might see on a desktop 3D printer, the motor in the cart is able to move the arrangement back and forth with minimal slop.
Installing the motor and pulley in the cart.
The cart actually holds all of the electronics in the project, including the power supplies, MA860H motor controller, a pair of endstop switches, and the Arduino that pulls it all together. A drag chain is used to keep the wires tight to the side of the rail without getting tangled up in anything.
[MakerMan] doesn’t explain much of the software side of this one, though we suppose he might only have been contracted to develop the hardware. But towards the end of the video you can see how the cart, now with large touch screen display mounted on top, moves back and forth when the appropriate commands are sent to the Arduino.
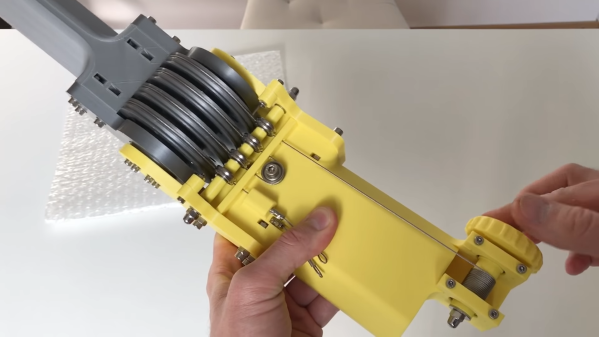
Even the oldest of mechanisms remain useful in modern technology. [Skyentific] has been messing with robotic joints for quite a while, and demonstrated an interesting way to use a pulley system in a robotic joint with quite a bit of mechanical advantage and zero backlash.
Inspired by the LIMS2-AMBIDEX robotic arm, the mechanism is effectively two counteracting sets of pulley, running of the same cable reel, with rollers allowing them to act around the bend of the joint. Increasing the mechanical advantage of the joint is simply a matter of adding pulleys and rollers. If this is difficult to envision, don’t work as [Skyentific] does an excellent job of explaining how the mechanism works using CAD models in the video below.
The mechanism is back drivable, which would allow it to be used for dynamic control using a motor with an encoder for position feedback. This could be a useful feature in walking robots that need to respond to dynamically changing terrain to stay upright, or in arms that need to push or pull without damaging anything. With properly tensioned cables, there is no backlash in the mechanism. Unfortunately cables can stretch over time, so it is something that needs to be considered when using this in a project.
Pulley systems have been with us for a very long time, and remain a very handy tool to have in your mechanical toolbox. A similar arrangement is used in the Da Vinci surgical robots to control their tiny manipulators. It would also be interesting to see this used in the already impressive robots of [James Bruton]. Continue reading “Cable Driven Robotic Joint”→
It’s a treadle lathe! No, it’s a power lathe! It’s a wood lathe! No, it’s a metal lathe! Actually, [Uri Tuchman]’s homebrew lathe is all of the above, and it looks pretty snazzy too.
To say that [Uri]’s creations are quirky is a bit of an understatement – birds, crustaceans, hands, and feet all appear repeatedly as motifs in his work – but there’s no overstating his commitment to craftsmanship. [Uri] turns wood and metal into wonderful tools, nonsense machines, and finely detailed instruments, like this exquisitely engraved astrolabe we featured a while back.
[Uri] mostly works with hand tools, supplemented by an old Singer treadle-powered sewing machine that he turned into a scroll saw. The video below shows how he added a small scratch-built lathe to the treadle base. His first pass at a headstock, using pillow blocks for bearings, didn’t work as well as he wanted, so he built a new headstock around off-the-shelf lathe parts. The aluminum extrusion bed holds the headstock, tailstock, and a custom-built tool rest of heavy brass, all of which look great alongside the rich wood accent pieces and base. And for those times when his feet are tired, he added a surplus electric motor to turn the spindle. We especially like the two settings on the motor speed control: “0” and “>0”. Classic [Uri].
The first thing to notice about [Bijuo]’s cat-sized quadruped robot designs (link is in Korean, Google translation here) is how slim and sleek the legs are. That’s because unlike most legged robots, the limbs themselves don’t contain any motors. Instead, the motors are in the main body, with one driving a half-circle pulley while another moves the limb as a whole. Power is transferred by a cable acting as a tendon and is offset by spring tension in the joints. The result is light, slim legs that lift and move in a remarkable gait.
[Bijuo] credits the Cheetah_Cub project as their original inspiration, and names their own variation Mini Serval, on account of the ears and in keeping with the feline nomenclature. Embedded below are two videos, the first showing leg and gait detail, and the second demonstrating the robot in motion.
After a couple of millennia of fiddling with gears, you’d think there wouldn’t be much new ground to explore in the field of power transmission. And then you see something like an infinitely variable transmission built from nested pulleys, and you realize there’s always room for improvement.
The electric motors generally used in robotics can be extremely efficient, often topping 90% efficiency at high speed and low torque. Slap on a traditional fixed-ratio gearbox, or change the input speed, and efficiency is lost. An infinitely variable transmission, like [Alexander Kernbaum]’s cleverly named Inception Drive, allows the motor to stay at peak efficiency while smoothly changing the gear ratio through a wide range.
The mechanism takes a bit of thought to fully grok, but it basically uses a pair of split pulleys with variable spacing. The input shaft rotates the inner pulley eccentrically, which effectively “walks” a wide V-belt around a fixed outer pulley. This drives the inner pulley at a ratio depending on the spacing of the pulley halves; the transmission can shift smoothly from forward to reverse and even keep itself in neutral. The video below will help you get your head around it.
We’ve seen a couple of innovative transmissions around here lately; some, like this strain-wave gear and this planetary gearbox, are amenable to 3D printing. Looks like the Inception Drive could be printed too. Hackers, start your printers and see what this drive can do.
There’s talk of robots and AIs taking on jobs in many different industries. Depending on how much stock you place in that, it might still be fair to say the more creative fields will remain firmly in the hands of humans, right?
Well, we may have some bad news for you. Robots are now painting our murals.
Estonian inventor [Mihkel Joala] — also working at SprayPainter — successfully tested his prototype by painting a 30m tall mural on a smokestack in Tartu, Estonia. The creative procedure for this mural is a little odd if you are used to the ordinary painting process: [Joala] first takes an image from his computer, and converts it into a coordinate grid — in this case, about 1.5 million ‘pixels’. These pixels are painted on by a little cart loaded with five colours of spray paint that are able to portray the mural’s full palette once combined and viewed at a distance. Positioning is handled by a motor at the base of the mural controlling the vertical motion in conjunction with tracks at the top and bottom which handle the horizontal motion.
For this mural, the robot spent the fourteen hours trundling up and down a set of cables, dutifully spraying the appropriate colour at such-and-such a point resulting in the image of a maiden cradling a tree and using thirty cans of spray paint in the process.