![]()
Happy Halloween from everyone at Hackaday! To help you enjoy the holiday here are a few festive links:
[Mike Kohn] whipped up a set of motion tracking eyeballs to make his decor extra creepy.
There’s not much to this jet-pack costume but the results are pretty amusing.
The eyes on [Tim Butler’s] skeleton prop don’t follow you around the room, but they do use a PIR sensor to light up the skull.
Speaking of skulls, [Tom] is using some real skulls as decorations. He also added lights where the eyeballs should be, but he is using a photoresistor and comparator to turn on some LEDs.
[Clark] built a Mecha Robot Warrior costume for his son. With all of those LED strips we think he’ll be pretty safe when crossing the street!
And finally, [Jesse] added a lot to his prop in order to produce a Sinister Joker. That’s Joker-as-in-cards and not as in Batman. It’s got an IR distance sensor as a trigger, with a motor to move the wrist, lights for the eyes, and a sound shield to give it a disturbing voice.

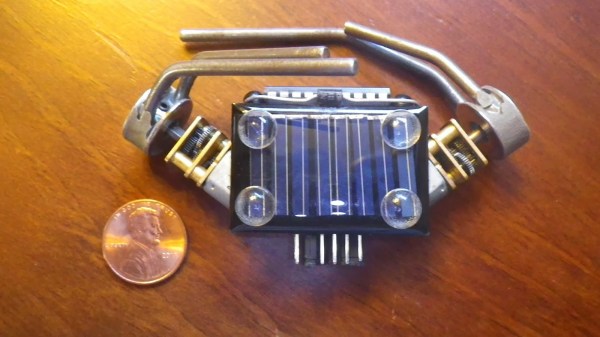
 Back at New York MakerFaire 2012, we noticed an amazing little steampunk quadruped robot walking around in the crowd outdoors. The robot was amazingly well executed, and had a unique ability to draw children over with it’s puppy like animations. It turns out this is
Back at New York MakerFaire 2012, we noticed an amazing little steampunk quadruped robot walking around in the crowd outdoors. The robot was amazingly well executed, and had a unique ability to draw children over with it’s puppy like animations. It turns out this is