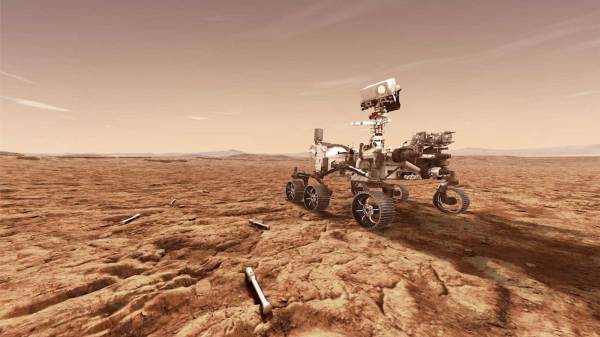
With the roughly 20-day wide launch window for the Mars 2020 mission rapidly approaching, the hype train for the next big mission to the Red Planet is really building up steam. And with good reason — the Mars 2020 mission has been in the works for a better part of a decade, and as we reported earlier this year, the rover it’s delivering to the Martian surface, since dubbed Perseverance, will be among the most complex such devices ever fielded.
“Percy” — come on, that nickname’s a natural — is a mobile laboratory, capable of exploring the Martian surface in search of evidence that life ever found a way there, and to do the groundwork needed if we’re ever to go there ourselves. The nuclear-powered rover bristles with scientific instruments, and assuming it survives the “Seven Minutes of Terror” as well as its fraternal twin Curiosity did in 2012, we should start seeing some amazing results come back.
No prior mission to Mars has been better equipped to answer the essential question: “Are we alone?” But no matter how capable Perseverance is, there’s a limit to how much science can be packed into something that costs millions of dollars a kilogram to get to Mars. And so NASA decided to equip Perseverance with the ability to not only collect geological samples, but to package them up and deposit them on the surface of the planet to await a future mission that will pick them up for a return trip to Earth for further study. It’s bold and forward-thinking, and it’s unlike anything that’s ever been tried before. In a lot of ways, Perseverance’s sample handling system is the rover’s raison d’être, and it’s the subject of this deep dive.