Going down the list (FCC, CE, UL, etc.) we can’t think of a regulating body that will test for this failure mode. Reportedly, a $1M irrigation system was taken down by a spider. And an itsy-bitsy spider at that.
This fail turned up as a quick image post over on /r/mildlyinteresting but I wasn’t the only electronics person attracted like a moth to a flame. Our friend [Sprite_TM] popped in to answer a question about conformal coating. Seems this board was sealed in a waterproof enclosure but was obviously not conformally coated.
 [Sprite_TM] also helped out with some armchair-engineering to guess at what happened. It’s not hard to tell that the footprint on the board looks like a set of mechanical relays all in a line. He looked up the most likely pinout for the relay.
[Sprite_TM] also helped out with some armchair-engineering to guess at what happened. It’s not hard to tell that the footprint on the board looks like a set of mechanical relays all in a line. He looked up the most likely pinout for the relay.
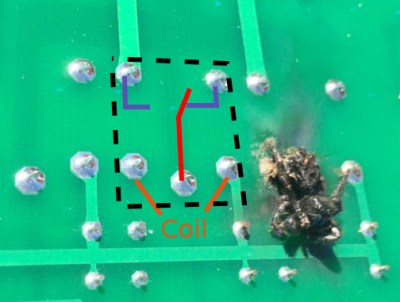
We’ve superimposed that pinout on the board to help illustrate the failure. High voltage comes in on the pin shown with the red trace leading away from it. On either side of that pin are the connections for the low voltage coil which switches from normally closed (the pin in the upper right that is not connected to anything) to the normally open pin (which has the wide trace leading away from it).
So there sat the high voltage pin in between the coil pins when, along came a spider. It shorted the pins and presumably all the way back to the power supply for the low voltage rail. [Fugly_Turnip] (the OP) share some additional detail about the system and this failure; in addition to this card it fried the control module as well.
Another comment on the same thread shares a different story of two boards mounted next to each other with a bug shorting a 1/4″ air gap between two boards and causing similar carnage. Have you encountered Arachno-fail-ia of your own? Let us know below.
 Fail of the Week is a Hackaday column which celebrates failure as a learning tool. Help keep the fun rolling by writing about your own failures and sending us a link to the story — or sending in links to fail write ups you find in your Internet travels.
Fail of the Week is a Hackaday column which celebrates failure as a learning tool. Help keep the fun rolling by writing about your own failures and sending us a link to the story — or sending in links to fail write ups you find in your Internet travels.