Wheels do a great job at rolling over all kinds of terrain, particularly if you pair them with compliant tires. However, they’re not perfect, and can get stumbled by things like large vertical steps. Enter the PaTS-Wheel — a compliant mechanism that can tackle such obstacles with ease.
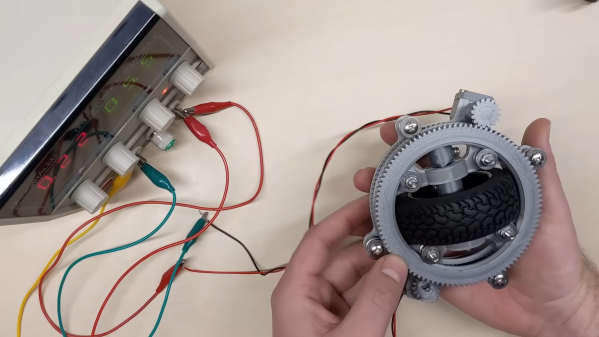
The PaTS-Wheel takes advantage of printable flexural hinges. Under regular conditions, it exists as a simple round wheel. However, when presented with a step obstacle, its individual segments can bend and flex to grab on to the step and hoist the vehicle up. It all happens passively as a result of the wheel’s structure, no actuators or control system are needed to achieve this action.
The video below does a great job of explaining the concept in raw engineering terms, as well as showing it in action. If you really want to drill down though, dive into the research paper. The design outperformed smooth wheels and whegs in climbing ability, and was able to match smooth wheels in simple tests of flat ground power consumption. The results are very impressive.
We’ve seen other transforming wheels before, like these wheg-like constructions, but nothing so passive and elegant as these. Video after the break.
Continue reading “3D Printed Wheels Passively Transform To Climb Obstacles”