At this point, we’ve lost count of how many automation projects we’ve seen with some variant of a Raspberry Pi at the helm. Which is hardly surprising, as the boards are cheap, powerful, and well documented. The list of reasons not to use one has never been very long, but with the PiCon One that [Frank] has been working on, it’s about to get even shorter.
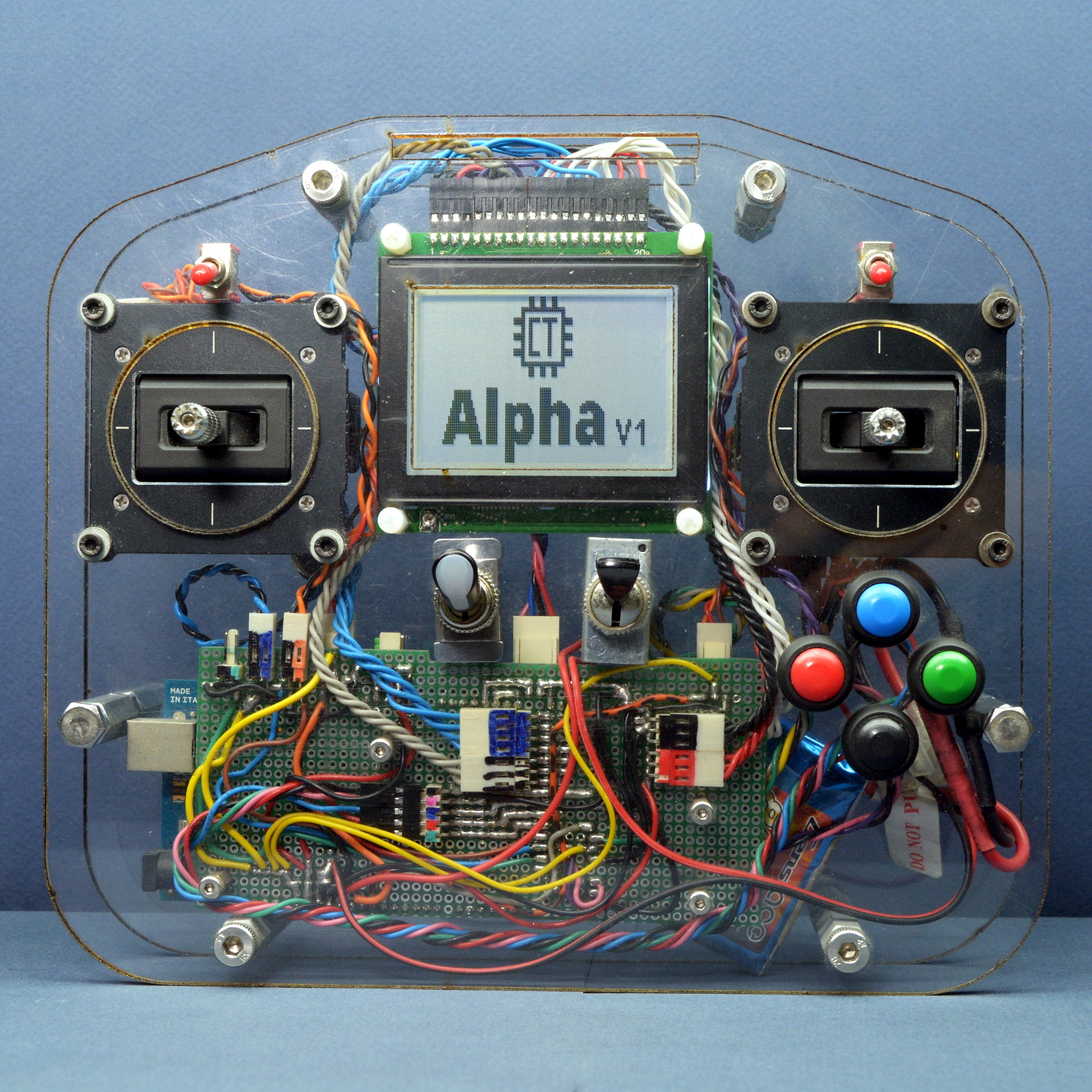
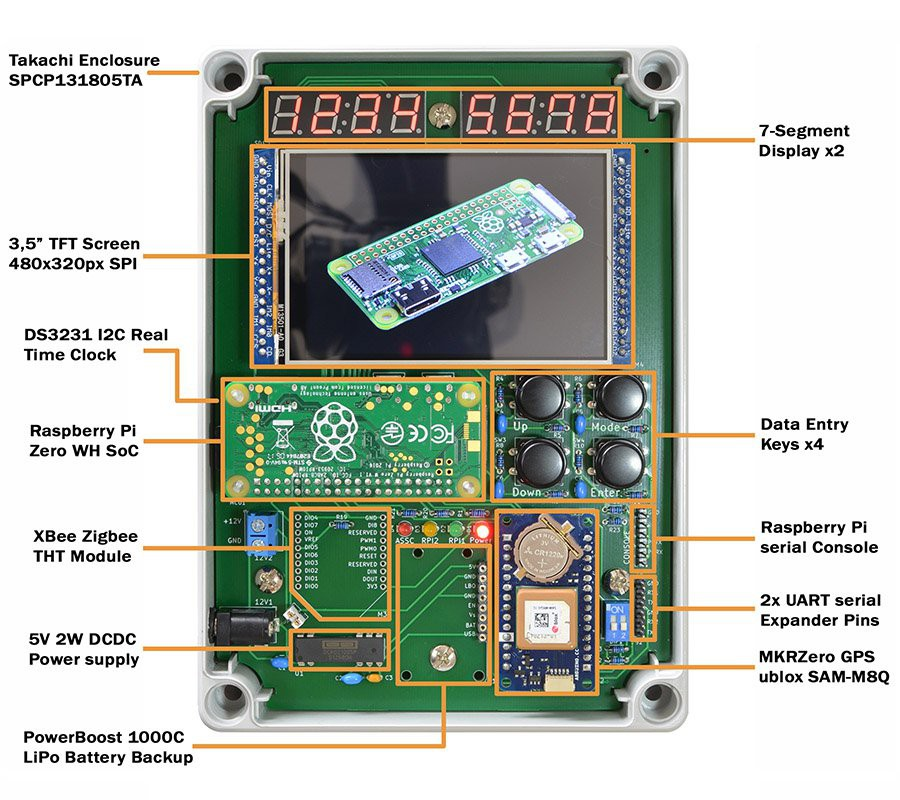 The project takes the form of an IP65 industrial enclosure and support electronics that the Raspberry Pi Zero W plugs into. While expandable in nature, [Frank] has a core set of features he’s aiming for as a baseline such as additional serial ports, integrated uninterruptible power supply, a battery-backed Real Time Clock (RTC), an array of programmable status LEDs, and support for XBee and GPS plug-in modules. Feedback is provided through a pair of four digit seven-segment displays and a color 320×480 TFT screen running a custom user interface.
The project takes the form of an IP65 industrial enclosure and support electronics that the Raspberry Pi Zero W plugs into. While expandable in nature, [Frank] has a core set of features he’s aiming for as a baseline such as additional serial ports, integrated uninterruptible power supply, a battery-backed Real Time Clock (RTC), an array of programmable status LEDs, and support for XBee and GPS plug-in modules. Feedback is provided through a pair of four digit seven-segment displays and a color 320×480 TFT screen running a custom user interface.
[Frank] envisions the PiCon One for use as a rugged solar power controller, eventually able to measure array output, energy consumption, and even operate motorized mounts to keep the panels pointed at the sun. To that end, he’s recently been experimenting with running JPL’s Horizon software on the Pi to determine the sun’s position in real-time. But the device is capable of so much more, and would make an ideal controller for many home and potentially even industrial applications.
Continue reading “Building The Ultimate Raspberry Pi Automation Controller”