GPS has changed the way we get around the globe. But if you command a warship, you must think about what you would do if an adversary destroyed or compromised your GPS system. The Royal Navy and Imperial College London think a quantum navigation system might be the answer.
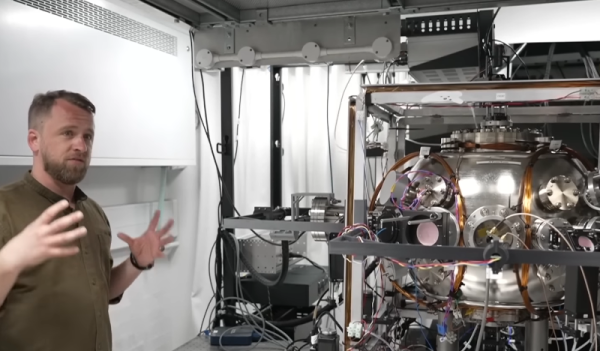
Of course, Heisenberg says you can’t know your speed and position simultaneously. But at the real-world level, you can apparently get close enough. The quantum sensors in question are essentially accelerometers. Unlike conventional accelerometers, though, these devices use ultracold atoms to make very precise measurements using a laser optical ruler, which means they do not drift as rapidly as, say, the accelerometer in your phone. Navigating with accelerometers is well understood, but the issue is how often you have to correct your computed position with an actual reference due to drift and other error accumulation. You can see a Sky News report on the trial below. Continue reading “Royal Navy Tests Quantum Navigation”