Riding a bike is a pretty simple affair, but like with many things, technology marches on and adds complications. Where once all you had to worry about was pumping the cranks and shifting the gears, now a lot of bikes have front suspensions that need to be adjusted for different riding conditions. Great for efficiency and ride comfort, but a little tough to accomplish while you’re underway.
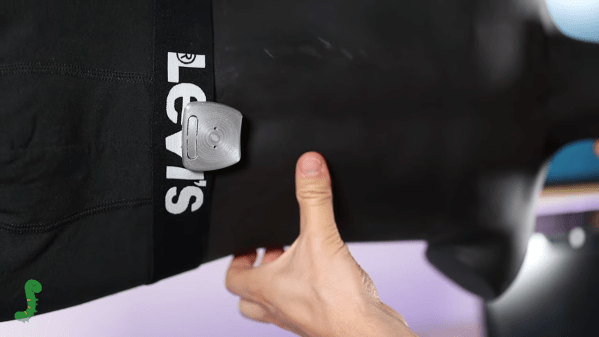
Luckily, there’s a solution to that, in the form of this active suspension system by [Jallson S]. The active bit is a servo, which is attached to the adjustment valve on the top of the front fork of the bike. The servo moves the valve between fully locked, for smooth surfaces, and wide open, for rough terrain. There’s also a stop in between, which partially softens the suspension for moderate terrain. The 9-gram hobby servo rotates the valve with the help of a 3D printed gear train.
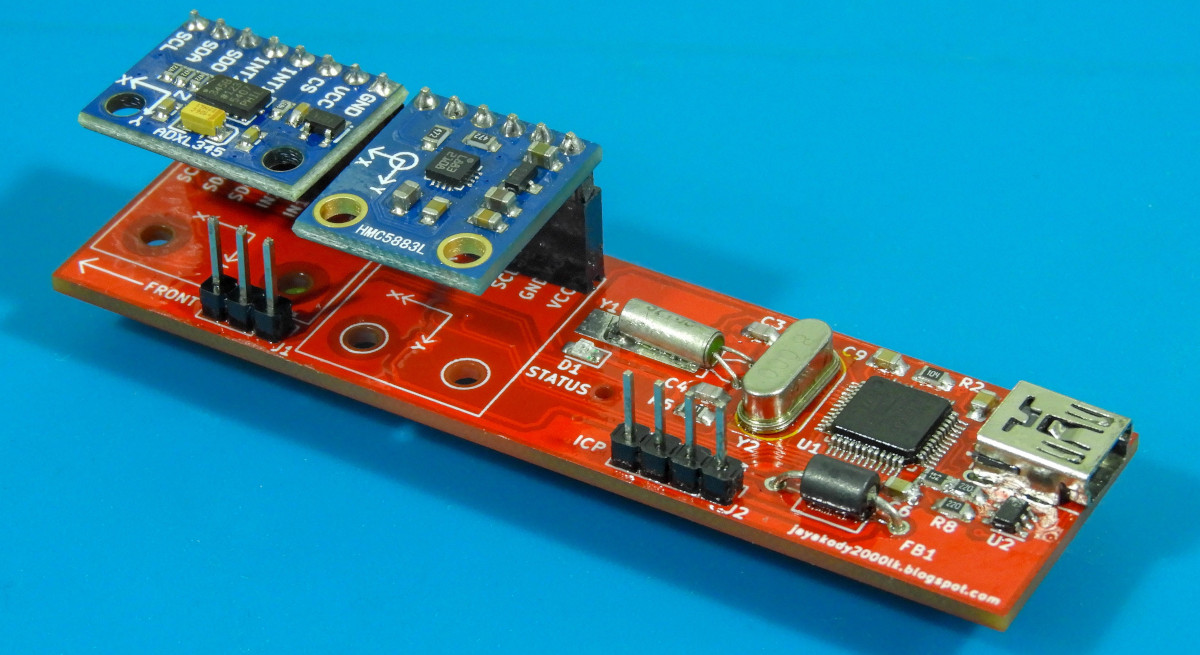
But that’s not all. Rather than just letting the rider control the ride stiffness from a handlebar-mounted switch, [Jallson S] added a little intelligence into the mix. Ride data from the accelerometer on an Arduino Nano 33 BLE Sense was captured on a smartphone via Arduino Science Journal. The data was processed through Edge Impulse Studio to create models for five different ride surfaces and rider styles. This allows the stiffness to be optimized for current ride conditions — check it out in action in the video below.
[Jallson S] is quick to point out that this is a prototype, and that niceties like weatherproofing still have to be addressed. But it seems like a solid start — now let’s see it teamed up with an Arduino shifter.
Continue reading “Smart Bike Suspension Tunes Your Ride On The Fly”