‘Tis the season for gift giving, and what better to give than a newfound love for hacking, soldering, and blinkenlights? In order to spread cheer and education at the local hackerspace, [Tom Goff] created this festive tree circuit board that can either sit in a stand to be admired, or worn as jewelry. The resistors are even designed to look like candy canes hanging from the boughs.
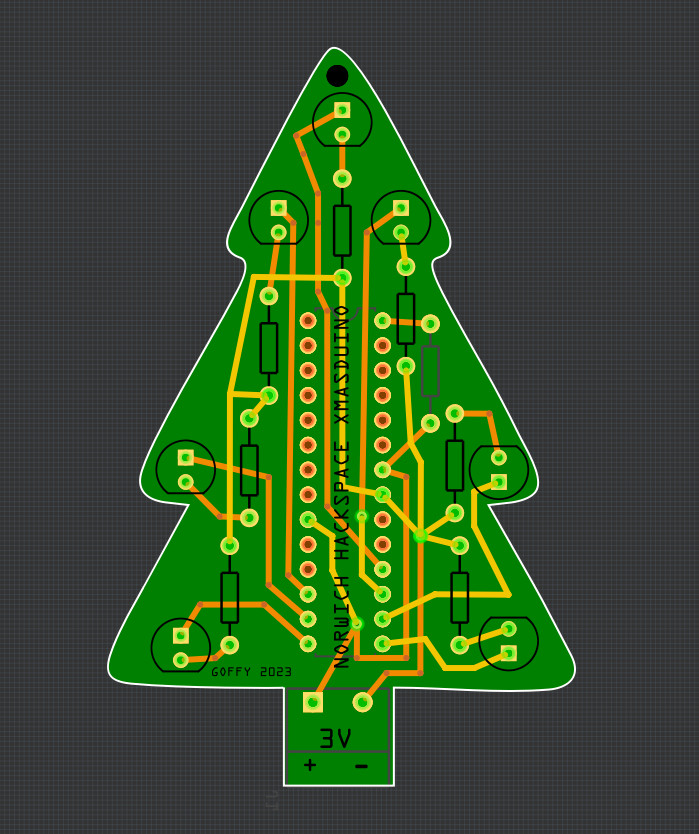 The brains of this festive little tree is an ATmega328P, which you probably recognize as the microcontroller that powers the Arduino Uno. Although this circuit has none of the extra bits you’d find on an Uno, not even a crystal oscillator, it can still be programmed with Arduino and use the 8 MHz internal clock.
The brains of this festive little tree is an ATmega328P, which you probably recognize as the microcontroller that powers the Arduino Uno. Although this circuit has none of the extra bits you’d find on an Uno, not even a crystal oscillator, it can still be programmed with Arduino and use the 8 MHz internal clock.
[Tom] has provided good, thorough instructions, especially for the sticky bit of setting up the IDE to program using the 8 MHz internal clock. So even if you’re nowhere near Norwich Hackerspace, you can join in the fun. Be sure to check out the video after the break, wherein [Tom] walks through designing the PCB using Inkscape and Fritzing.
Want to whip up a little something for the hackerspace wall? Check out this Sierpinski Christmas tree.