There are places that you can go in person, but for everything else, there’s FPV. Whether you’re flying race quads, diving the depths in a yellow submarine, or simply roving the surface of the land, we want to see your builds. If it’s remote controlled, and you feel like you’re in the pilot’s seat, it’s FPV.
When you say “first person view” many of you will instinctively follow up with “flight” or “drone”. But given the ease of adding a camera and remote control to almost any vehicle, there’s no reason to only fly the FPV skies. (Of course, we want to see your crazy quadcopter builds too.)
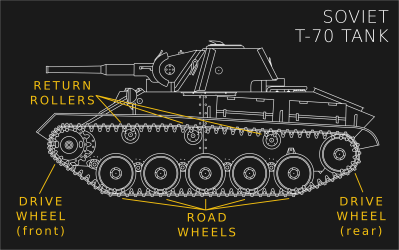
We went looking for a few less-traditional examples to whet your appetite, and we found a lot. There are super-cute FPV bots for indoors and more robust tanks for cruising around the neighborhood. In the summer, you’ll probably need an FPV lawnmower, and for the winter, naturally, an FPV snowblower or a budget-friendly FPV snow-boat. Or skip the outdoors entirely and terrorize the pool with an FPV sub.
This contest isn’t exclusively about the vehicles either. If you’re working on the tech that makes FPV possible, we want you to enter. For instance, this simple quad/drone tracker will help keep your video feed running and your mind on flying. This cockpit will make the immersion more complete. And nobody likes the jello-cam effect that excess vibration can cause, so we’d like to see camera hacks as well.
And of course, your quads. Is your FPV quad too fast, too light, or does it fly too far? Show us. The contest starts now and runs until Jan 3, 2023, and there are three $150 shopping sprees courtesy of Digi-Key on the line. Get hacking!