Levitating things with magnets is no great feat these days. We don’t see as many projects with sonic levitation. However, Japanese engineers have a new method to lift objects using sound. The process isn’t totally reliable yet, but it may lead to better methods in the future. You can see a video about the work below.
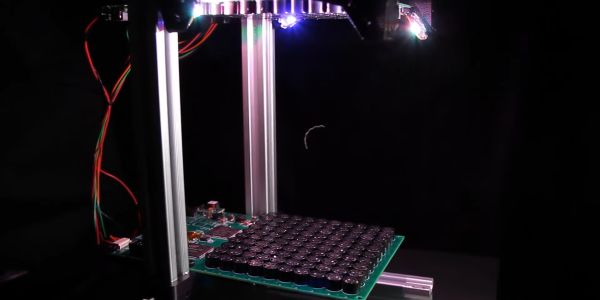
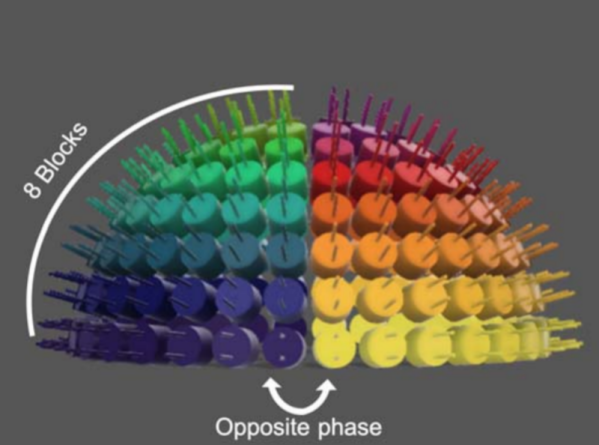
Manipulating very small items via laser or acoustics isn’t new. However, there are significant limitations to current methods. This new approach uses an array of hemispherical ultrasound transducers. By controlling the amplitude and phase of each transducer, an acoustic trap forms and can pick up a 3 mm polystyrene ball without direct contact.
Manipulating objects without contact interests us for a few reasons, not the least of which is circuit assembly. Robust technology of this type could also add new dimensions to additive manufacturing. Of course, it is a long way from a 3 mm polystyrene ball to a surface mount component. However, you have to admit watching components just float through the air to their final resting places would be something to see.
Not that we haven’t seen sonic levitation before. Magnetic levitation tends to be easier, but also has some limitations.