It has never been easier to put a microcontroller and other electronics into a simple project, and that has tremendous learning potential. But when it comes to mechanical build elements like enclosures, frames, and connectors, things haven’t quite kept the same pace. It’s easier to source economical servos, motors, and microcontroller boards than it is to arrange for other robot parts that allow for cheap and accessible customization and experimentation.
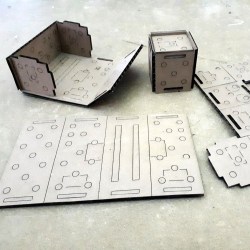 That’s where [Andy Forest] comes in with the Laser Cut Cardboard Robot Construction Kit, which started at STEAMLabs, a non-profit community makerspace in Toronto. The design makes modular frames, enclosures, and basic hardware out of laser-cut corrugated cardboard. It’s an economical and effective method of creating the mechanical elements needed for creating robots and animatronics while still allowing easy customizing. The sheets have punch-out sections for plastic straws, chopstick axles, SG90 servo motors, and of course, anything that’s missing can be easily added with hot glue or cut out with a knife. In addition to the designs being open sourced, there is also an activity guide for educators that gives visual examples of different ways to use everything.
That’s where [Andy Forest] comes in with the Laser Cut Cardboard Robot Construction Kit, which started at STEAMLabs, a non-profit community makerspace in Toronto. The design makes modular frames, enclosures, and basic hardware out of laser-cut corrugated cardboard. It’s an economical and effective method of creating the mechanical elements needed for creating robots and animatronics while still allowing easy customizing. The sheets have punch-out sections for plastic straws, chopstick axles, SG90 servo motors, and of course, anything that’s missing can be easily added with hot glue or cut out with a knife. In addition to the designs being open sourced, there is also an activity guide for educators that gives visual examples of different ways to use everything.
Cardboard makes a great prototyping material, but what makes the whole project sing is the way the designs allow for easy modification and play while being easy to source and produce.