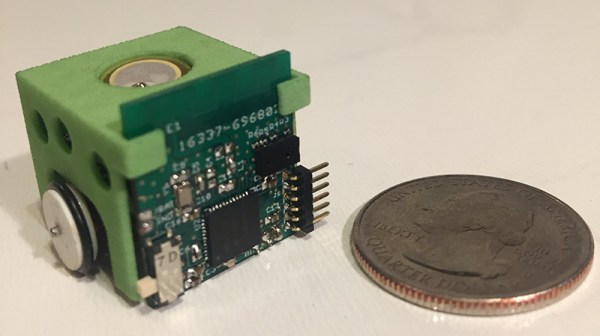
The world is full of educational robots for STEAM education, but we haven’t seen one as small or as cute as the Skoobot, an entry in this year’s Hackaday Prize. It’s barely bigger than an inch cubed, but it’s still packed with motors, a battery, sensors, and a microcontroller powerful enough to become a pocket-sized sumo robot.
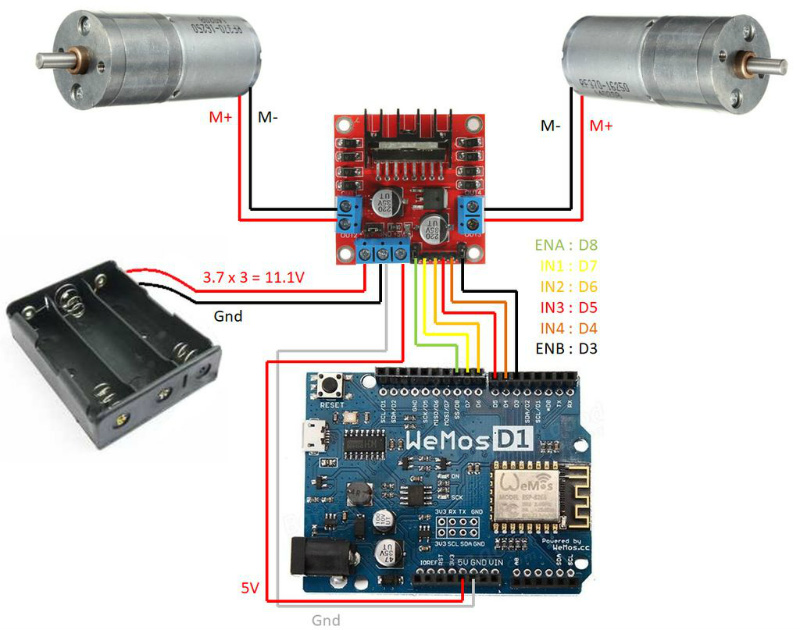
The hardware inside each Skoobot is small, but powerful. The main microcontroller is a Nordic nRF52832, giving this robot an ARM Cortex-M4F brain and Bluetooth. The sensors include a VL6180X time of flight sensor that has a range of about 100mm. Skoobot also includes a light sensor for all your robotic photovoring needs. Other than that, the Skoobot is just about what you would expect, with a serial port, a buzzer, and some tiny wheels mounted in a plastic frame.
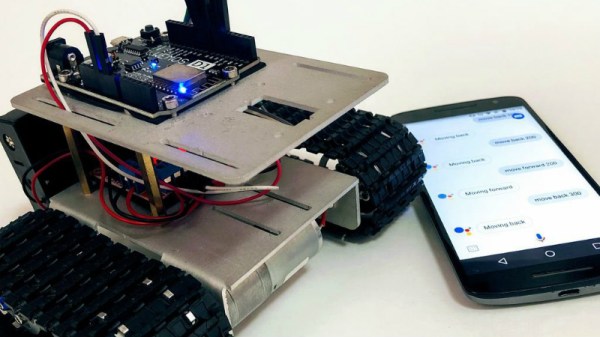
The idea behind the Skoobot is to bring robotics to the classroom, introducing kids to fighting/sumo robots, while still being small, cheap, and cute. To that end, the Skoobot is completely controllable via Bluetooth so anyone with a phone, a Pi, or any other hardware can make this robot move, turn, chase after light, or sync multiple Skoobots together for a choreographed dance.
While the Skoobot is an entry for this year’s Hackaday Prize, the creator of the Skoobot, [Bill Weiler] is also making these available on Crowd Supply.