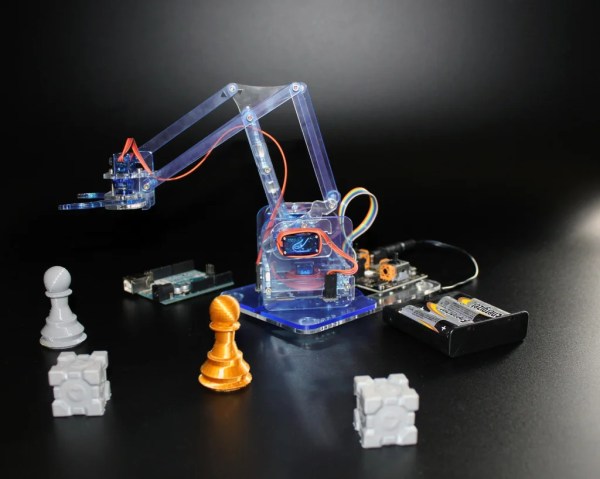
We all might dream of having an industrial robot arm at our disposal, complete with working controller that doesn’t need constant maintenance and replacement parts, and which is able to help us with other projects with only a minimum of coding or instruction. That’s a pipe dream for most of us, as without a large space, sufficient funding, or unlimited amounts of troubleshooting time we’ll almost always have to look for something smaller and simpler. Perhaps something even as small as this pocket-sized robotic arm.
This isn’t actually the first time we’ve seen the MeArm; the small robot has been around since 2014 and has undergone a number of revisions and upgrades. Even this revision has been out for a little while now but this latest in the series is now available with a number of improvements over the older models. The assembly time required has been reduced from two hours to about 30 minutes and the hardware has even been fully open-sourced as well which allows virtually anyone with the prerequisite tools to build this tiny robot for whatever they happen to need it for, due to its very permissive licensing.
The linked Instructable goes into every detail needed for building the robot as well as documenting all of the parts needed, although you will need access to some specialty tools to make a lot of them. We also featured a Friday Hack Chat about these robots back in 2018 that has some interesting details about these robots in it, and although this is a relatively small robot in the grand scheme of things it’s always possible to upgrade to something larger in the future.