Back in the old days, finding out your location on Earth was a pretty involved endeavor. You had to look at stars, use fancy gimballed equipment to track your motion, or simply be able to track your steps really really well. Eventually, GPS would come along and make all that a bit redundant for a lot of use cases. That was all well and good, until it started getting jammed all over the place to frustrate militaries using super-accurate satellite-guided weapons.
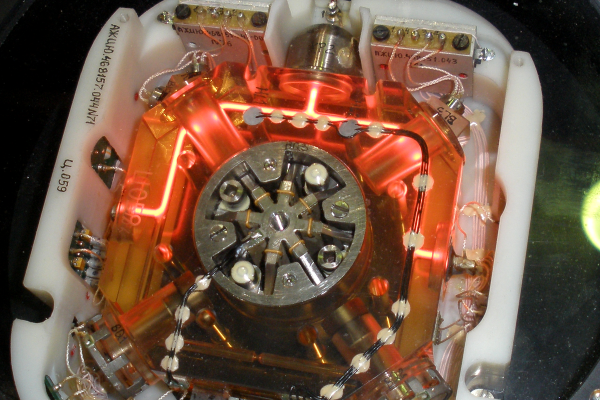
Today, there’s a great desire for more accurate navigational methods that don’t require outside communications that can easily be jammed. High-tech gyroscopes have long been a big part of that effort, allowing the construction of inertial navigation systems with greater accuracy than ever before.
Continue reading “Fancy Gyroscopes Are Key To Radio-Free Navigation”




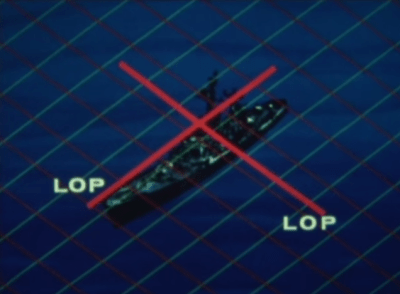 A ship’s receiving equipment performed navigation by comparing the phase difference between detected signals. This calculation was based around “lanes” that served to divvy up the distance between stations into equal divisions. A grid of these lanes formed by eight stations’ worth of overlapping signals provides intersecting lines of position (LOP) that give the sailor his fix.
A ship’s receiving equipment performed navigation by comparing the phase difference between detected signals. This calculation was based around “lanes” that served to divvy up the distance between stations into equal divisions. A grid of these lanes formed by eight stations’ worth of overlapping signals provides intersecting lines of position (LOP) that give the sailor his fix.








