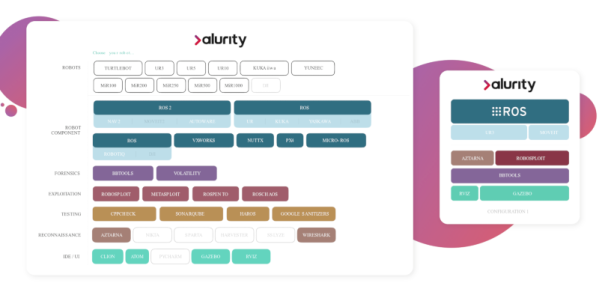
One of the pleasures of consuming old science fiction movies and novels is that they capture the mood of the time in which they are written. Captain Kirk was a 1960s guy and Picard was a 1990s guy, after all. Cold war science fiction often dealt with invasion. In the 1960s and 70s, you were afraid of losing your job to a computer, so science fiction often had morality tales of robots running amok, reminding us what a bad idea it was to give robots too much power. As it turns out, robots might be dangerous, but not for the reasons we thought. The robots won’t turn on us by themselves. But they could be hacked. To that end, there’s a growing interest in robot cybersecurity and Alias Robotics is releasing Alurity, a toolbox for robot cybersecurity.
Currently, the toolbox is available for Linux and MacOS with some support for Windows. It targets 25 base robots including the usual suspects. There’s a white paper from when the product entered testing available if you want more technical details.
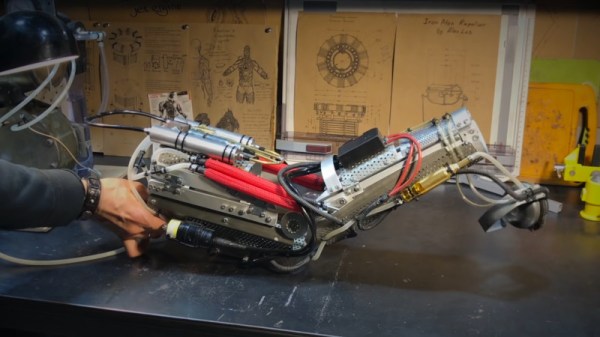
The idea of building a suit that increases the wearer’s strength is a compelling one, often featured in science fiction. There are a handful of real world examples, and [Alex] can now add his to the list. The build comes with a twist however, relying on hydrogen to do the work.
At its heart, the build is not dissimilar to other artificial muscle projects. The muscles in [Alex’s] build consist of a rubber tube inside a nylon braid. When the rubber tube is inflated, it expands, causing the nylon braid to shorten as it grows wider. Commonly, such builds rely on compressed air to power the muscles, however [Alex] took a different path. Instead, water is electrolysed in a chamber designed to look like Iron Man’s arc reactor, with the resulting gases produced being used to drive the muscles. With five muscles ganged up to pull together, the wearable arm support is capable of generating up to 15 kg of pull force.
It’s a design that has a few benefits; the electrolyser has no moving parts, and is much simpler and quieter than a typical air compressor. Obviously, there is a risk of fire thanks to the flammable gases used, but [Alex] explains the precautions taken to minimise this risk in the video.
Exosuits may not be mainstream just yet, but that doesn’t mean people aren’t working to make them a reality. We’ve featured a few before, like this open-source design. Video after the break.
We’ve all seen videos of blisteringly fast SCARA arms working on assembly lines, and more than a few of us have fantasied about having that same kind of technology for the home shop. Unfortunately, while the prices for things like 3D printers and oscilloscopes have dropped lower than what many would have believed possible a decade ago, high-performance robotics are still too pricey for the home player.
Unless of course, you’re willing to build it yourself. The PyBot designed by [jjRobots] is an open source robotic arm that should be well within the means of the average hardware hacker. One could argue that this is a project made entirely possible by desktop 3D printing; as not only are most of the structural components printed, but most of the mechanical elements are common 3D printer parts. Smooth rods, linear bearings, lead screws, and NEMA 17 motors are all exceptionally cheap these days thanks to the innumerable 3D printer kits that make use of them.
A custom control board keeps the wiring tight.
Those who’ve researched similar projects might notice that the design of this arm has clearly been influenced by the Mostly Printed SCARA (MPSCARA). But while that robot was designed to carry an extruder and act as a 3D printer, [jjRobots] intends for the PyBot to be more of a general purpose platform. By default it features a simple gripper, but that can easily be changed out for whatever tool or gadget you have in mind.
In the base of the arm is a custom control board that combines an Arduino M0, an ESP8266, and a trio of stepper motor drivers. But if you wanted to build your own version from the parts bin, you could certainly wire up all the principle components manually. As the name implies, the PyBot is controlled by Python tools running on the computer, so it should be relatively easy to get this capable arm to do your bidding.
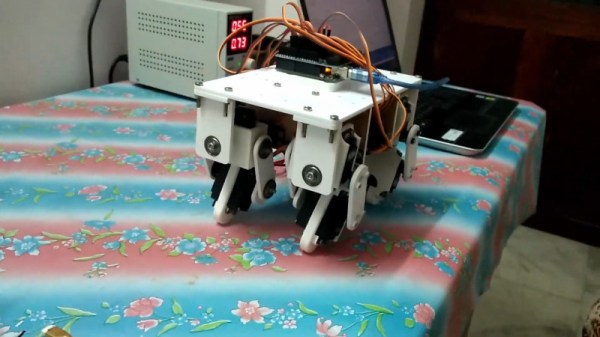
Robot locomotion is a broad topic, and there are a multitude of choices for the budding designer. Often, nature is an inspiration, and many ‘bots have been built to explore the motion regimes of various insects and animals. Inspired himself by the common inch worm, [jegatheesan.soundarapandian] decided to build a robot that moved in a similar way.
The build consists of a series of 3D printed linkages, with servos fitted in between. This allows the robot’s body to articulate and flex in much the same way as a real inch worm. By flexing the body up, shifting along, and flexing back down, the robot can slowly make its way along a surface. An Arduino Pro Mini is the brains of the operation, being compact enough to fit on the small robot while still having enough outputs to command the multiple servos required. Control is via a smartphone app, using MIT’s AppInventor platform and the venerable HC-05 Bluetooth module.
It’s a fun build, and we’d love to see it go further with batteries replacing the tether and perhaps some sensors to enable it to further interact with its environment. We’ve seen other creative 3D-printed designs before, too – like this spherical quadruped ‘bot. Video after the break.
Around the World in 80 Days may have been an impressive feat of international travel in a world before widespread air transit. In modern times though, it’s not even necessary to leave your home in order to travel around the world. To that end, [Norbert] is attempting to accomplish this journey using a robot that will do the traveling for him as part of this year’s Virtual Maker Faire.
The robot is called the World Tour Robot, and the idea for it is to be small enough to ship to each new location around the world and be simple enough to be repaired easily. It is driven by two servo motors and controlled by a Raspberry Pi which also handles a small camera. Once at its location, it can connect to the internet and then be able to be controlled through a web interface. Locations are selected by application, and the robot is either handed off to the next person in the chain or put back in a box to be shipped.
[Stevej52] likes to build things you can’t buy, and this Jetson Nano robot falls well within that category. Reading the project details, you might think [Stevej52] drinks too much coffee. But we think he is just excited to have successfully pulled off the Herculean task of integrating over a dozen hardware and software modules. Very briefly, he is running Ubuntu and ROS on the PC and Nano. It is all tied together with Python code, and is using Modbus over IP to solve a problem getting joystick data to the Nano. We like it when existing, standard protocols can be used because it frees the designer to focus more on the application. Modbus has been around for 40 years, has widespread support in many languages and platforms.
This is an ongoing project, and we look forward to seeing more updates and especially more video of it in action like the one found below. With the recent release of a price-reduced Jetson Nano, which we covered last week, this might be an excellent project to take on.
As far as robots are concerned, wheels and tracks are great ways to get around when you’ve got serious work to do. However, if you want to build something that feels more animal than machine, building a walking ‘bot is the way to go. [Technovation] delivers a great example in the form of this quadruped design.
It’s a build executed in the modern style, taking full advantage of contemporary design tools and processes. The entire robot is built around twelve servo motors that provide rotation and translation to the robot’s joints. After importing the servo models into Fusion 360, [Technovation] set about building the rest of the body around them. An Arduino Uno runs the show, which addresses the many servos thanks to a Sensor Shield that has a multitude of useful outputs.
[Technovation] put a specific focus on durability and robustness during the design phase. The platform is intended as a test bed for various walking styles and gaits, and thus any hardware failures would be an unnecessary distraction from the project’s goals. The chassis is a great platform to learn on, and we expect to see further developments in future.