[Ran D. St. Clair] has created a unique flying machine in the Flex 9. It’s not every day that you see a completely new and unusual aircraft, but the Flex 9 definitely fits the bill. [Ran] took 9 radio controlled planes, connected them together, and made one giant plane — and with an 18-foot wingspan, giant isn’t a misnomer.
The planes that make up the Flex 9 are simple aircraft – foamboard wings, a boom, and a basic tail. The individual planes only have elevator control – no rudder, no ailerons. Power comes from a standard LiPo battery, ESC and brushless outrunner motor. The control system is interesting – every plane has a KK board flight controller running OpenAeroVTOL firmware. The center plane has a radio receiver and communicates to the other KK boards over standard servo wires. Rudder (yaw) and aileron (bank) control are achieved through mixing handled by flight controllers.
Even the couplings between the planes were carefully designed. [Ran] used an EPP foam core as a rubbery dampener, with plywood to strengthen the joint. Each joint is mounted at a 20-degree angle. As the planes bank relative to each other, the angle forces the airframe to twist, which should help the whole system stay level.
Check out the videos below for an explanation and a flight test. The Flex 9 launch isn’t exactly stable – there’s some crazy sinusoidal wobbling going on. But the mechanical and electronic dampeners quickly spring into action smoothing the flight out.
If you’d like to know more about the KK board, you can read about right here.
Continue reading “9 Planes Combine To Make One Giant Flexible Flier”



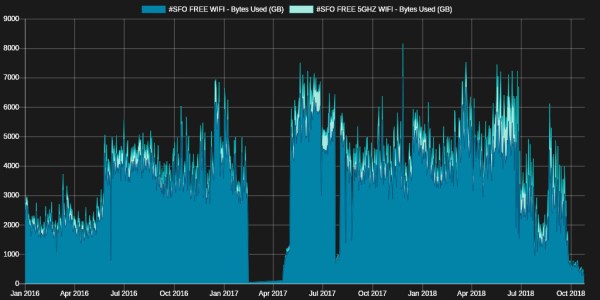
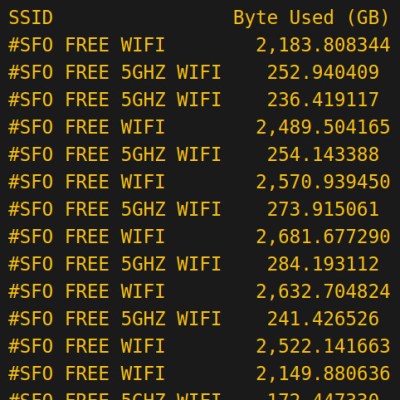 We’re not sure if this particular data mining hack falls under that description, but it’s good to know if you want information about what government is doing, you can get it and fast! From the first request to receiving the info was just 10 days.
We’re not sure if this particular data mining hack falls under that description, but it’s good to know if you want information about what government is doing, you can get it and fast! From the first request to receiving the info was just 10 days.