Remote-controlled cars can get incredibly fast and complex (and expensive) the farther into the hobby you get. So much so that a lot of things that are missing from the experience of driving a real car start to make a meaningful impact. [Indeterminate Design] has a few cars like this which are so fast that it becomes difficult to react to their behavior fast enough through sight alone. To help solve this problem and bridge the gap between the experience of driving a real car and an RC one, he’s added force feedback steering to the car’s remote control.
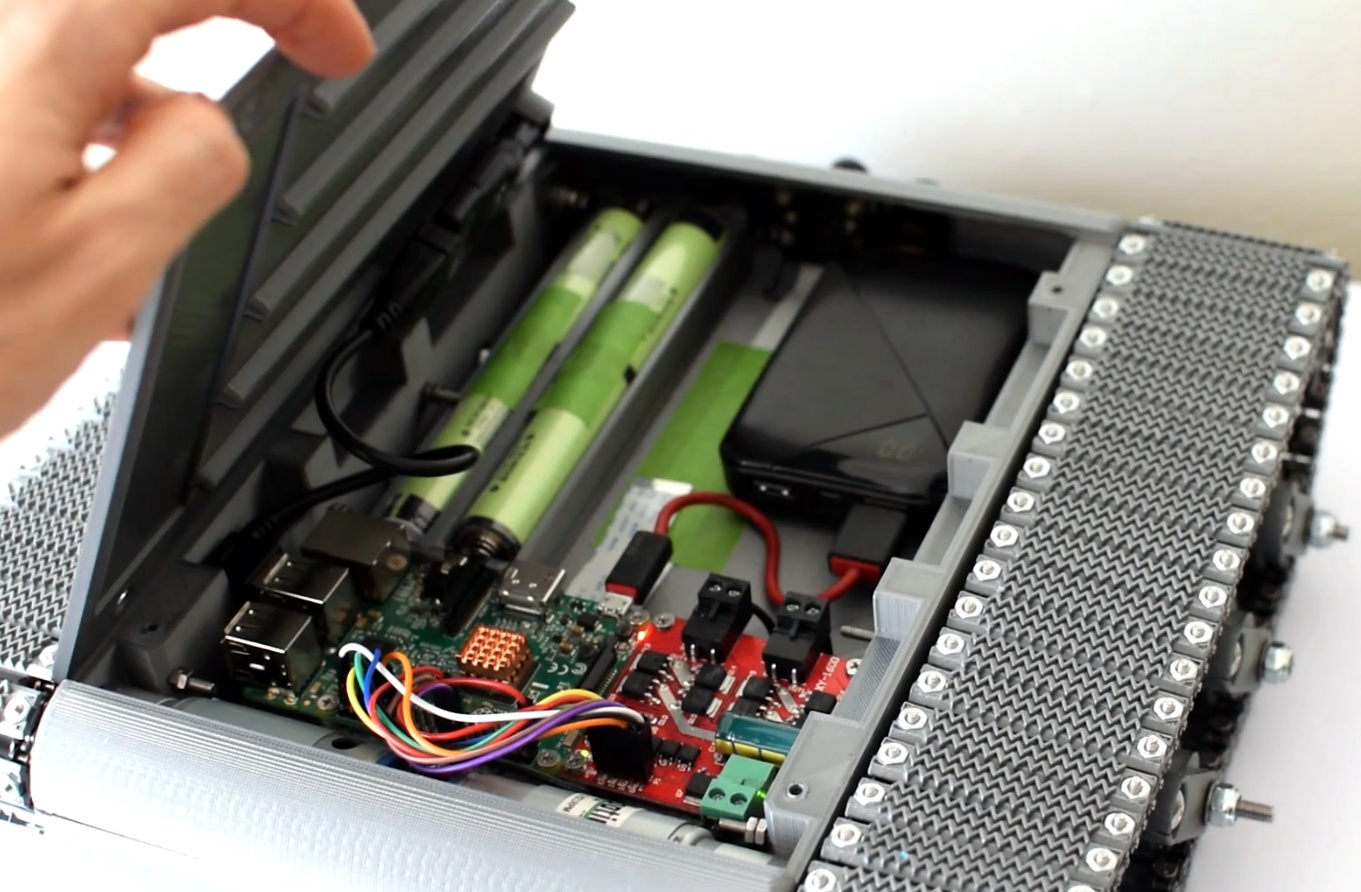
The first thing to tackle is the data throughput required to get a system like this working wirelessly. Relying heavily on the two cores in each of a pair of ESP32s, along with a long-range, high-speed wireless communications protocol called ESP-NOW, enough data from the car can be sent to make this possible but it does rely on precise timing to avoid jitter in the steering wheel. Some filtering is required as well, but with the small size of everything in this build it’s also a challenge not to filter out all of the important high-frequency forces. With the code written, [Indeterminate Design] turned to the 3D printer to build the prototype controller with built-in motors to provide the haptic feedback.
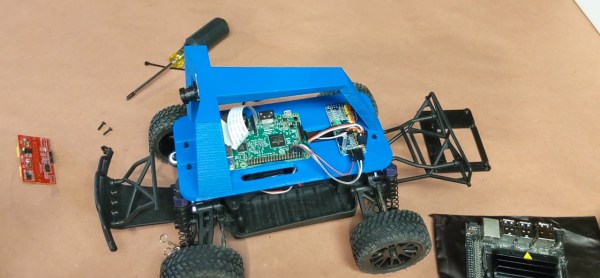
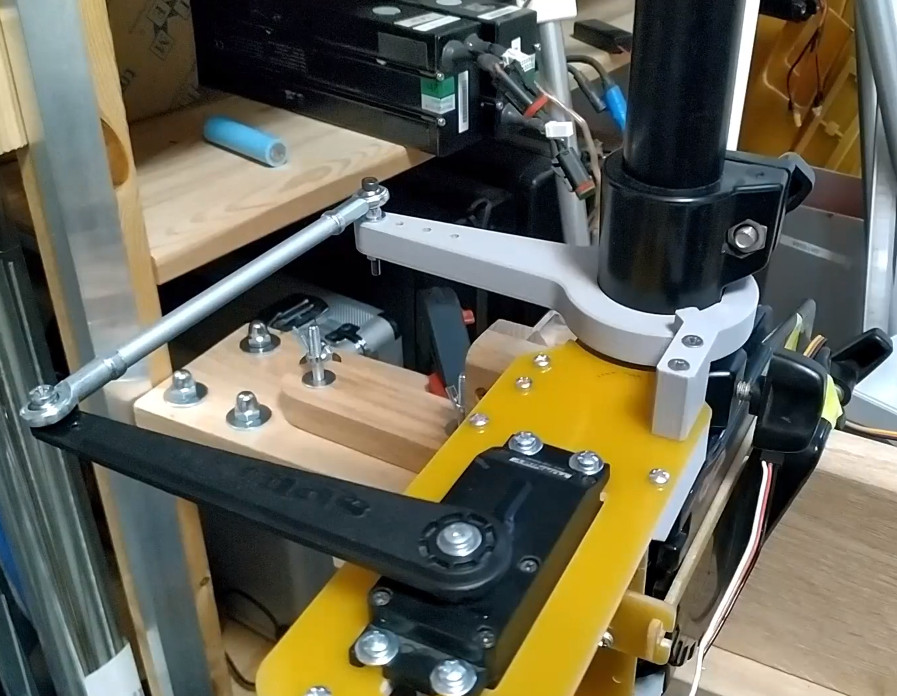
The other half of the project involves sensing the forces in the RC car which will then get sent back to the remote. After experimenting with a mathematical model to avoid having to source expensive parts and finding himself at a deadend with that method, eventually a bi-directional load cell was placed inside the steering mechanism which solved this problem. With all of these pieces working together, [Indeterminate Design] has a working force feedback steering mechanism which allows him to feel bumps, understeer, and other sensations, especially while doing things like drifting or driving through grass, that would be otherwise unavailable to drivers of RC cars. The only thing we could think of to bring this even more into realistic simulation territory would be to add something like a first-person view like high-speed drones often have.