The gear that helped us walk on the Moon nearly 60 years ago is still giving up its mysteries today, with some equipment from the Apollo era taking a little bit more effort to reverse engineer than others. A case in point is this radiographic reverse engineering of some Apollo test gear, pulled off by [Ken Shirriff] with help from his usual merry band of Apollo aficionados.
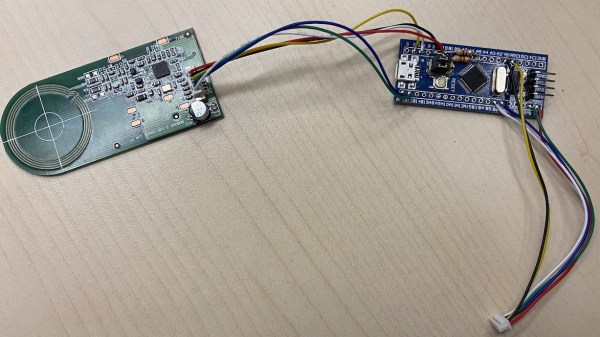
The item in question is a test set used for ground testing of the Up-Data Link, which received digital commands from mission controllers. Contrary to the highly integrated construction used in Apollo flight hardware, the test set, which was saved from a scrapyard, used more ad hoc construction, including cards populated by mysterious modules. The pluggable modules bear Motorola branding, and while they bear some resemblance to ICs, they’re clearly not.
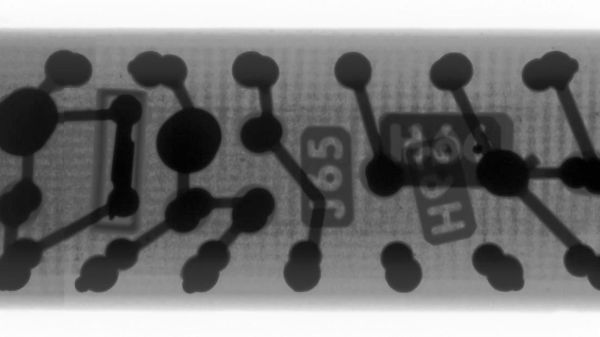
[Ken] was able to do some preliminary reverse-engineering using methods we’ve seen him employ before, but ran into a dead end with his scope and meter without documentation. So the modules went under [John McMaster]’s X-ray beam for a peek inside. They discovered that the 13-pin modules are miniature analog circuits using cordwood construction, with common discrete passives stacked vertically between parallel PCBs. The module they imaged showed clear shadows of carbon composition resistors, metal-film capacitors, and some glass-body diodes. Different angles let [Ken] figure out the circuit, which appears to be part of a square wave to sine wave converter.
The bigger mystery here is why the original designer chose this method of construction. There must still be engineers out there who worked on stuff like this, so here’s hoping they chime in on this innovative method.