In what looks like the kickoff of a fun video series, [MrL314] takes us on a quick but deep tour of how the AI in Mario Kart works. (Video, embedded below.) Don’t play much Mario Kart anymore? Well, have a look anyway because some of the very simple tricks that make Bowser pass Princess Peach without running into her might be useful in any manner of pre-programmed navigation scenarios.
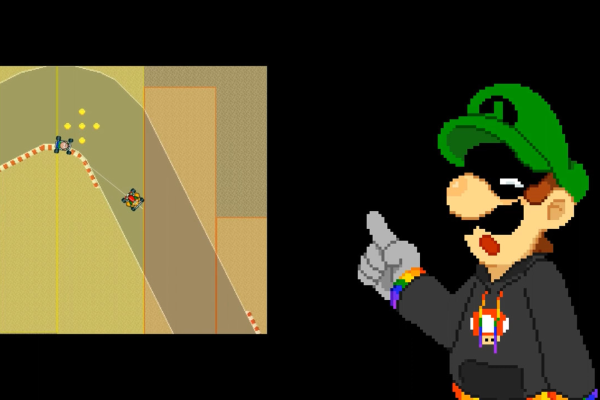
Quick spoilers. The CPU players move through different zones, each with a desired speed and a vector direction field that changes the direction they should point in. Only when they run off course do they actually compute headings to their target. Setting this desired direction and speed beforehand greatly reduces the on-the-fly computation needed.
Then you throw other players into the mix, and a very simple distance-dependant turning algorithm makes for clean overtaking. This effect is hand-tweaked for the particular racecourse, though, because you don’t want Luigi driving off the thin stretches on Rainbow Road. For more technical details, you can check out [MrL314]’s notes.
If anything, this video gives us a further appreciation of the clever little hacks that create apparently complex interactions from tremendously simple rules. Remember Mario Kart when you’re programming in that next multi-gigabyte neural network model, OK?