Sisyphus is cursed to roll a boulder up a hill for eternity. Pet fish generally content themselves to swimming the same lap over and over in a glass tank. Perpetuity can be soothing, so long as you’re not shouldering a boulder.
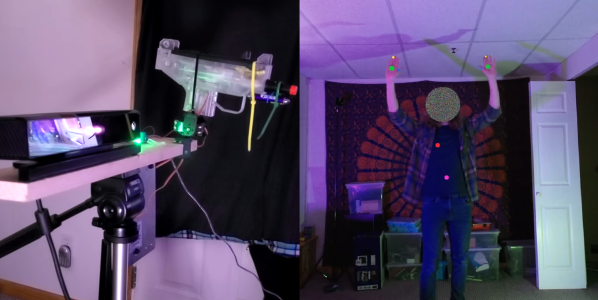
[Zach Frew] wants to integrate and automate the boulder on a smaller scale and one that can benefit his aquarium full of colorful Taiwanese bee shrimp. Instead of an inert rock and a Greek, Sisyphish uses a magnet and servo motors connected to a microcontroller to draw Spirograph-style shapes in the tank’s sand.
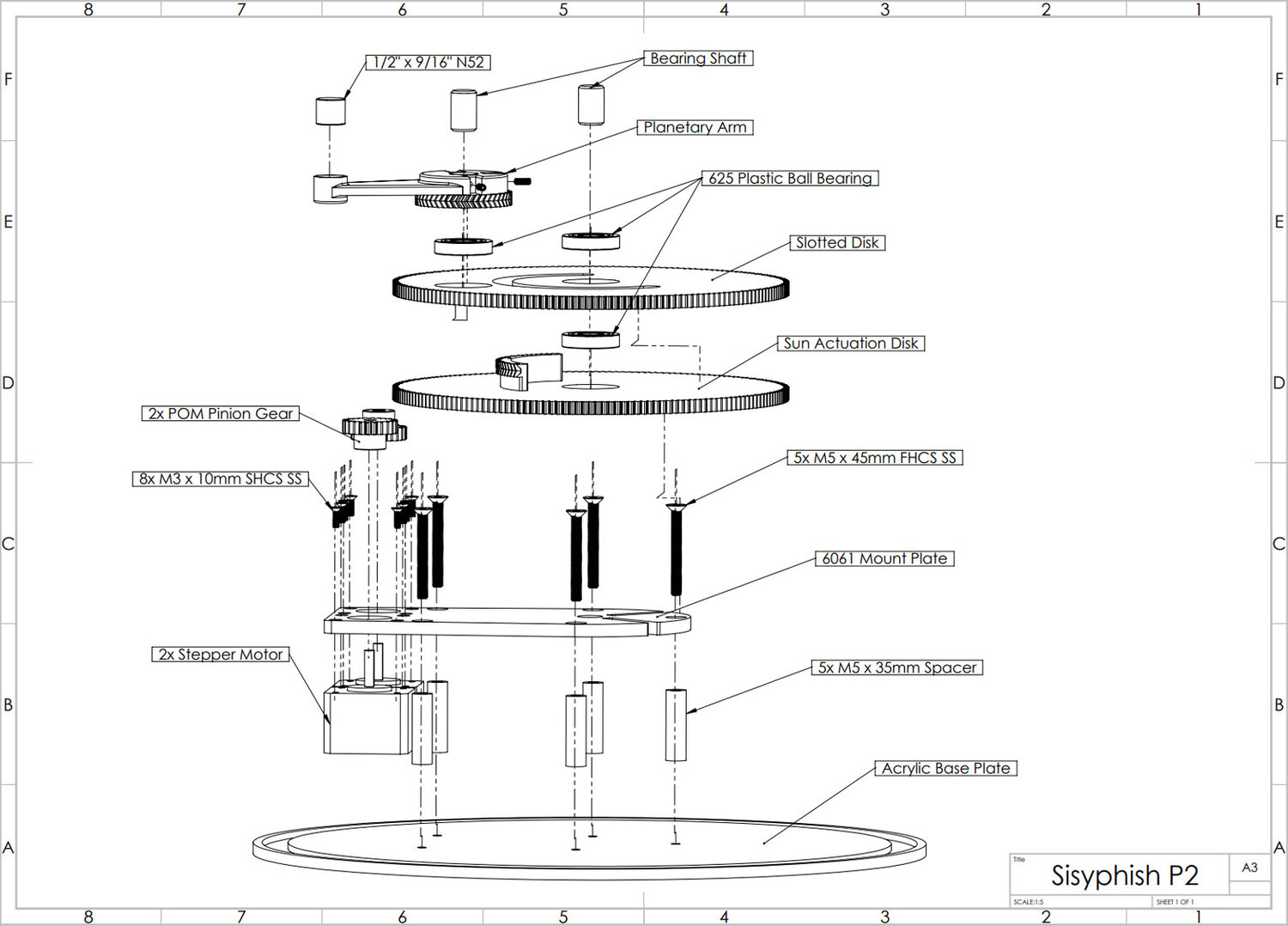
There are a couple of gears beneath the tank to trace the geometric patterns but they’re clear of any water. One gear rotates about the center of the cylindrical tank while the other holds a magnet and adjusts the distance from the center. Pilots, and select nerds, will recognize this as rho-theta positioning. Despite the uncommon coordinate system, the circular plotter accepts G-code. We love when math gets turned into gorgeous designs, and shrimp love when those tasty microbes get shaken from their gravelly hiding places.
We adore the dry sand plotters that came before, and Sisyphus himself appeared in a LEGO format that made us question our proficiency with the blocks.
Continue reading “Aquarium Plotter Shows Sisyphish’s Submerged Sand Stripes”