Have you ever considered the manufacture of candles? Not necessarily manufacturing them yourself, but how they are manufactured in a small-scale industrial setting? It’s something that has been of great concern to Michael Schuldt as he grappled with the task of automating a simple manual candle production process.
It’s not just an interesting subject, but the topic of manufacturing automation is something we can all learn from. This was the subject of his Adventures in Manufacturing Automation talk at the recent Hackaday Superconference which you’ll find below the break. Let’s dive in and see what this is all about!
Every year for the past 35 years, the German Chaos Computer Club has met just after Christmas for a few days of “Spaß am Gerät” — having fun with the machines. And that’s everything from trying to bring an old PDP-8 back into running condition to forging new software to replace the old and busted social media platforms that permeate our lives. The sum total of around 17,000 people doing the nerdy stuff that they love, and sharing it together, is both amazing and inspiring. Four days of little sleep and much socializing later, I bet there was still another four days’ worth of stuff to see.
The official theme this year was “Refreshing Memories” which honestly sounds a bit too much like a cola slogan, but was a great opportunity to think back on the hacks of the past that got us where we are. Assemblies put up shrines to their hacker heroes of the past. Retro computers were everywhere, in the talks and on the floor. This year’s Congress was a great time to look back and remember, but also to create new memories for the future. On that front, it was a total success.
But the unofficial theme this year was “Smooth Running”. Everything went very well, which is no small feat considering that the infrastructure, decoration, security, and even the medical response teams are from the Chaos community. It’s the depth of engagement that makes this work: of the 17,000 people who showed up, just over 4,000 of them volunteered for “angel” shifts — meaning they helped guard the doors, staff the info desks, or build up or tear down. It was the largest ever CCC, and you could feel it, but they pulled it off, and then some.
The angels are geeks just like you and me, and since everything went so smoothly, they had time to play. For instance, the phone operations people offer DECT phone service so that attendees can bring in their home phones and use them at Congress. In years past, the lines to register and enroll phones were painfully long. This year, it all happened online, and the result is that the phone ops crew got bored. That explains how they had time to establish roaming home-phone wireless service in some of the normal Leipzig city trams. Wait, what?
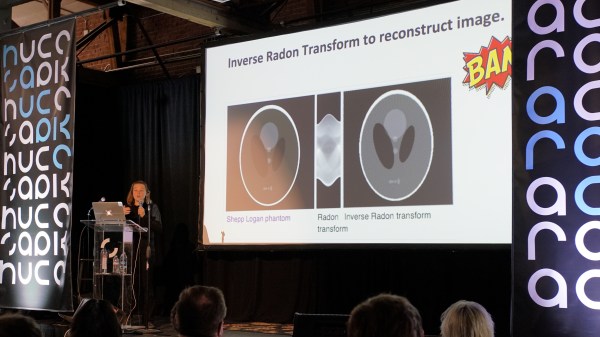
Medical imaging is one of the very best applications of technology — it allows us to peer inside of the human body without actually performing surgery. It’s non-destructive testing to the extreme, and one of the more interesting projects we’ve seen over the past year uses AC currents and an infinite grid of resistors to image the inside of a living organism. It’s called Spectra and it is the brainchild of [Jean Rintoul]. Her talk at the Hackaday Superconference is all about low cost and open source biomedical imaging.
We’ve seen some interesting medical imaging hacks in the Hackaday Prize over the years. There have been vein finders and even a CT scanner, but when it comes to biomedical imaging, the Spectra project is something different. Right now, it’s just good enough to image organs while they’re still inside your body, and there’s still a lot of potential to do more. Let’s take a closer look a how this works.
Motors are not overly complex, but this one is downright simple. Carl Bujega has been working on a motor design that heavily relies on the capabilities of the printed circuit board (PCB) fabrication processes. His talk at the 2018 Hackaday Superconference covers how he built a brushless DC motor and speed controller into a PCB. You can watch the newly published video after the break.
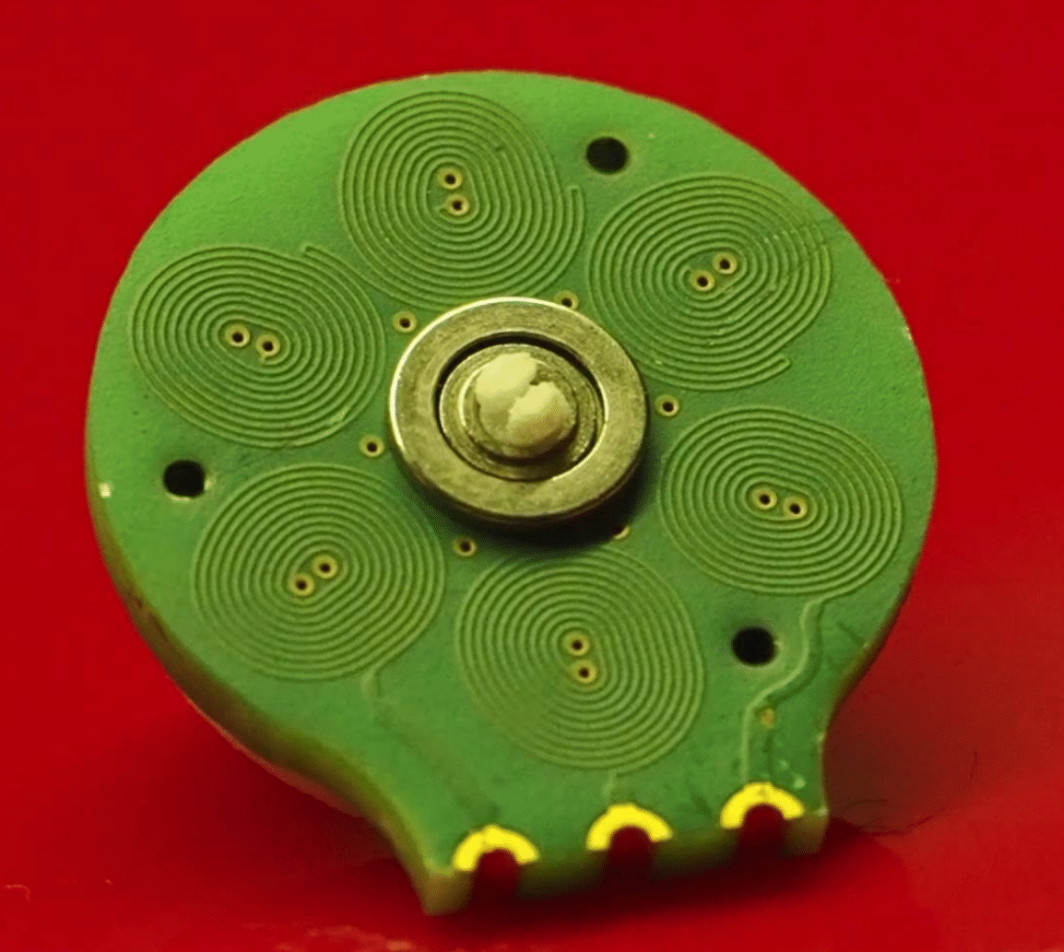
There are two main parts of an electric motor; the stator is stationary while the rotor spins on bearings. Electromagnetic forces are used to cause that spinning action. In this case, Carl has built the electromagnets as coils on a 4-layer circuit board (six coils on each layer). When electrified, a magnetic field is generated that pushes against the rare-earth magnets housed in the rotor.
A couple of things are really interesting here. First, those coils are usually made of “magnet wire” (enamel covered wire that is very thin) wrapped around an iron core. Using the circuit board instead saves both physical space, and the time and expense of wrapping coils of wire in the traditional way. Second, Carl has been designing with manufacture in mind; you can see in the image show that his motor design is dead-simple to assemble by inserting a 3mm bearing in the PCB, inserting magnets into the plastic rotor and snapping it into place. The end goal is to make robot actuators that are part of the circuit board itself.
The genesis of this idea came from Carl’s interest in drone design, in fact, he jumped right into a drone startup immediately after finishing his EE. The company didn’t last, but his thirst for interesting designs is ongoing. When looking at reducing the total parts necessary to build a quadcopter he happened on the idea of PCB-based coils and he’s followed it to this motor design, and beyond to some very interesting flexible-PCB robot design work which you can check out on his Hackaday.io page, YouTube, and Twitter.
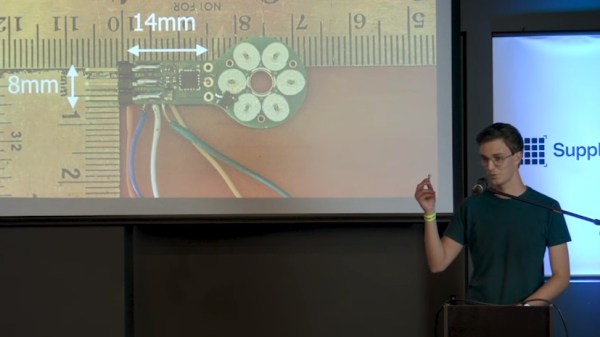
There are of course some trade-offs to this. The motor is low torque since it uses an air core and not an iron core. And he’s had trouble implementing a sensor-less Electronic Speed Controller (ESC) as the back-EMF from the coils appears to be too weak. Not to fret, he added a hall sensor and has succeeded in designing an ESC that measures just 14mm by 8mm. In fact, he’s holding up the ESC and motor in the image at the top of this article!
Writing device drivers is always a good start for a journey into the Linux kernel code. Of course, the kernel is a highly complex piece of software, and if you mess up your code properly, you might take down the entire system with you. User-space drivers on the other hand might not look as good on your CV, but they can help to work around some of the dangers and complexity of the kernel space. Plus, you don’t necessarily have to limit yourself to C to write them, especially if you are concerned about the usual C pitfalls and the security issues they can lead to.
At last year’s 34c3, [Paul] already demonstrated the basics of writing such a user-space network driver for Linux, which serves now as reference implementation for his students. We won’t see Bash or JavaScript here, but we will see a brief summary of what it generally means to develop user-space drivers in C#, Swift, OCaml, or Haskell, along a more detailed insight from [Sebastian Voit] and [Simon Ellmann] about Go and Rust. A collection of each language’s implementation can be found on GitHub.
Since some of these languages bring their own memory handling and perform unpredictable garbage collection, performance and latency are two big topics to cover here. But then, the general concept is language-independent, so even if nothing in the world could ever make you give up on C, you might at least take away some new ideas for driver development. Continue reading “35C3: Safe And Secure Drivers In High-Level Languages”→
Oh, the hijinks that the early days of the PC revolution allowed. Back in the days when a 20MB hard drive was a big deal and MS-DOS 3.1 ruled over every plain beige PC-clone cobbled together by enthusiasts like myself, it was great fun to “set up” someone else’s machine to do something unexpected. This generally amounted to finding an unattended PC — the rooms of the residence hall where I lived in my undergrad days were a target-rich environment in this regard — and throwing something annoying in the AUTOEXEC.BAT file. Hilarity ensued when the mark next booted the machine and was greeted with something like an inverted display or a faked hard drive formatting. Control-G was good to me too.
So it was with a sense of great nostalgia that I watched [Ben Cartwright-Cox]’s recent 35C3 talk on the anatomy and physiology of viruses from the DOS days. Fair warning to the seasoned reader that a sense of temporal distortion is inevitable while watching someone who was born almost a decade after the last meaningful release of MS-DOS discuss its inner workings with such ease. After a great overview of the DOS API elements that were key to getting anything done back then, malware or regular programs alike, he dives into his efforts to mine an archive of old DOS viruses, the payloads of most of which were harmless pranks. He built some tools to find viruses that triggered based on the system date, and used an x86 emulator he designed to test every day between 1980 and 2005. He found about 10,000 malware samples and explored their payloads, everything from well-wishes for the New Year to a bizarre foreshadowing of the Navy Seal Copypasta meme.
We found [Ben]’s talk a real treat, and it’s good to see someone from the current generation take such a deep dive into the ways many of us cut our teeth in the computing world.
Vacuum tubes fueled a technological revolution. They made the amplification of signals a reality for transatlantic telephone cables (and transcontinental ones too), they performed logic for early computers, and they delivered that warm fuzzy sound for high fidelity audio. But they were labor intensive to produce, and fragile, so semiconductors came along and replaced tubes in almost every application. But of course tubes are still with us and some tube applications are still critical — you’ll find them used in high-power RF and there are even satellites that depend on klystrons. So there are still experts in tube fabrication around, and Charles Alexanian is one of them. His newly-published talk at the 2018 Hackaday Supercon (found below) is a whirlwind tour of what goes into building a vacuum tube.
The process of building your own vacuum tube isn’t hard, but it’s not a walk in the park. The difficulty comes in the sheer number of processes, and the tricks of the trade found at every step. Charles’ methaphor is that if you build one tube at a time each step is like learning to ride a bicycle again, but if you build many you get into the swing of it and things go a lot better. His talk is a brief overview of everything, but if you want to drill down he also wrote an excellent article that goes further in depth.
In the working components of each tube are the precision parts: the grid (or grids). For the tube to function well these must be accurately produced which can be done with photolithography, but Charles usually uses a winding process involving a lathe. After winding, the grid is stretched to straighten the nickel wire, then cut to length. Other components such as the plate are stamped using an arbor press and simple forms he fabricates for the purpose.
Tube sealing machine common in factories
Lathe setup used for 1-off tube sealing
Tube being tested for leaks
Two glass components are used, the dome itself, and feedthrough stems that have a wire for each lead passing through a glass disc. The components are spot welded to the inside portion of the feedthrough stem, then the glass is fused together, again using a lathe. It heads over to a pumping station to evacuate the air from the tube, and is finally tested for leaks using a handheld Tesla coil (see, we knew those weren’t just toys).
Charles proposed his Supercon appearance as a chance to fabricate tubes on-site. We loved the idea, but the amount of gear needed is somewhat prohibitive (annealing ovens, vacuum cabinets, torches for sealing, and the need for 220v, plus space for it all). That’s too bad since we were really hoping to see the Jolly Wrencher in Nixie-tube form — incidentally, Charles says Nixes are simple to make compared to amplifiers and switches. He also mentions that the majority of your time is spent “washing” parts to remove impurities. Fair enough, that part sounds boring, but we hope to endure it at some point in the future because vacuum tube fabrication demos feel very much like a Hackaday event!