For all those who have complained about Rubik’s Cube solving robots in the past by dismissing purpose-built rigs that hold the cube in a non-anthropomorphic manner: checkmate.
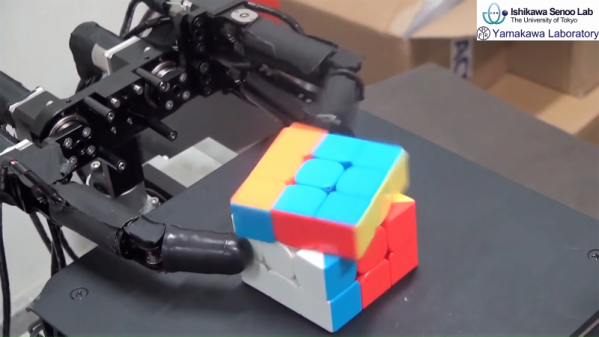
The video below shows not only that a robot can solve the classic puzzle with mechanical hands, but it can also do it with just one of them – and that with only three fingers. The [Yamakawa] lab at the University of Tokyo built the high-speed manipulator to explore the kinds of fine motions that humans perform without even thinking about them. Their hand, guided by a 500-fps machine vision system, uses two opposing fingers to grip the lower part of the cube while using the other finger to flick the top face of the cube counterclockwise. The entire cube can also be rotated on the vertical axis, or flipped 90° at a time. Piecing these moves together lets the hand solve the cube with impressive speed; extra points for the little, “How’s that, human?” flick at the end.
It might not be the fastest cube solver, or one that’s built right into the cube itself, but there’s something about the dexterity of this hand that we really appreciate.
Continue reading “Robot Solves Rubik’s Cube With One Hand Tied Behind Its Back”