Even the oldest of mechanisms remain useful in modern technology. [Skyentific] has been messing with robotic joints for quite a while, and demonstrated an interesting way to use a pulley system in a robotic joint with quite a bit of mechanical advantage and zero backlash.
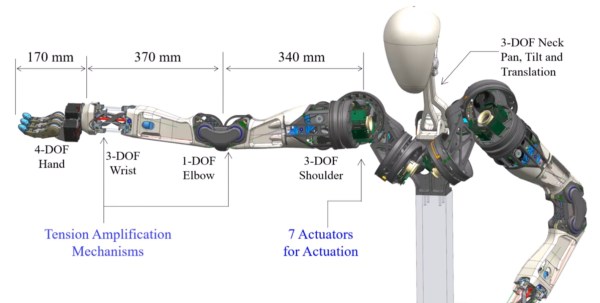
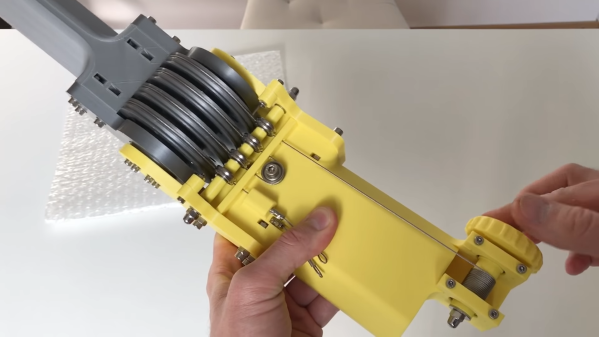
Inspired by the LIMS2-AMBIDEX robotic arm, the mechanism is effectively two counteracting sets of pulley, running of the same cable reel, with rollers allowing them to act around the bend of the joint. Increasing the mechanical advantage of the joint is simply a matter of adding pulleys and rollers. If this is difficult to envision, don’t work as [Skyentific] does an excellent job of explaining how the mechanism works using CAD models in the video below.
The mechanism is back drivable, which would allow it to be used for dynamic control using a motor with an encoder for position feedback. This could be a useful feature in walking robots that need to respond to dynamically changing terrain to stay upright, or in arms that need to push or pull without damaging anything. With properly tensioned cables, there is no backlash in the mechanism. Unfortunately cables can stretch over time, so it is something that needs to be considered when using this in a project.
Pulley systems have been with us for a very long time, and remain a very handy tool to have in your mechanical toolbox. A similar arrangement is used in the Da Vinci surgical robots to control their tiny manipulators. It would also be interesting to see this used in the already impressive robots of [James Bruton]. Continue reading “Cable Driven Robotic Joint”