When life hands you a mysterious bit of vintage avionics, your best bet to identifying it might just be to get it in front of the biggest bunch of hardware hounds on the planet. After doing a teardown and some of your own investigation first, of course.
The literal black box in question came into [Ken Shirriff]’s custody courtesy of [David] from Usagi Electric, better known for his vacuum tube computer builds and his loving restoration of a Centurion minicomputer. The unit bears little in the way of identifying markings, but [Ken] was able to glean a little by inspecting the exterior. The keypad is a big giveaway; its chunky buttons seem optimized for use with the gloved hands of a pressure suit, and the ordinal compass points hint at a navigational function. The layout of the keypad is similar to the Apollo DSKY, which might make it a NASA artifact. Possibly contradicting all of that is the oddball but very cool electromechanical display, which uses reels of digits and a stepper-like motor to drive them.
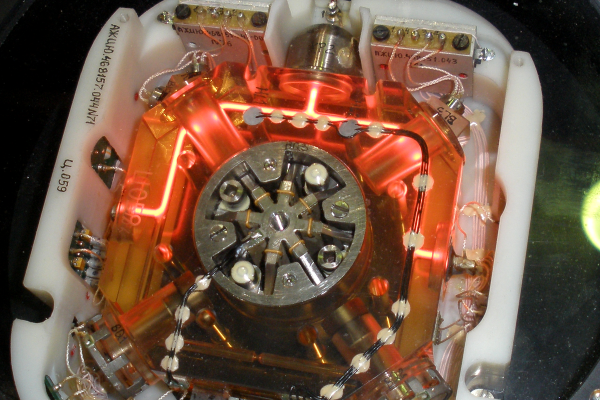
Inside, more mysteries — and more clues — await. Unlike a recent flight computer [Ken] looked at, most of the guts are strictly electronic. The instrument is absolutely stuffed with PCBs, most of which are four-layer boards. Date codes on the hundreds of chips all seem to be in the 1967 range, dating the unit to the late 60s or early 70s. The weirdest bit is the core memory buried deep inside the stacks of logic and analog boards. [Ken] found 20 planes with the core, hinting at a 20-bit processor.
In the end, [Ken] was unable to come to any firm conclusion as to what this thing is, who made it, or what its purpose was. We doubt that his analysis will end there, though, and we look forward to the reverse engineering effort on this piece of retro magic.