Most of the commercially-available pet feeders littering the internet are cheaply-made, with wimpy motors and infuriating interfaces. Want to use it outdoors? Good luck. If you need a heavy-duty, outdoor cat feeder, you gotta heat up your soldering iron and do it yourself.
[jplanaux] is under contract to feed a bunch of feral cats that hang around, but he’s often gone for weeks at a time. His two-feeder fail-over system has one weak link, and it’s these commercial feeders — they’re under-powered and just plain unreliable, even after modding them for Raspi control. What he needed was an industrial strength automatic feeder that’s completely customized for his situation.
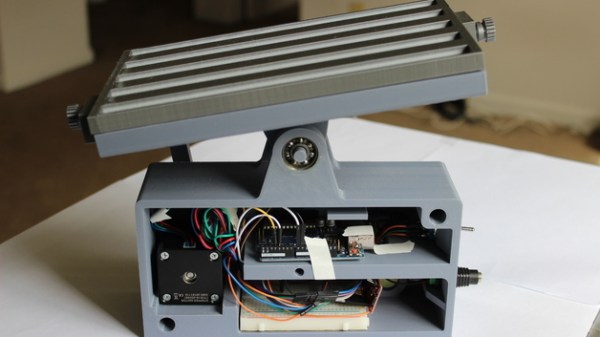
A simple web interface lets him set up automatic feeding times, or push kibble on demand if customers show up and there’s no food. The system takes pictures of the bowl to verify that food came out and was subsequently eaten. It’s supposed to be racoon-proof, so [jplanaux] can see who or what is chowing down. Aside from that, the feeder is pretty standard, with a large hopper on top of a screw drive that’s driven by a NEMA17. The stepper is relay-driven, so it only uses power when it’s driving the screw.
[jplanaux] has the STL files and code available, and even designed a bowl and base extension for people who want to build one and use it indoors. Nibble at the kibble-sized demo video after the break.
The lion’s share of the auto-feeder builds we chew on around here are designed for dry food. Serving wet food is a much harder problem, but is definitely possible to pull off.