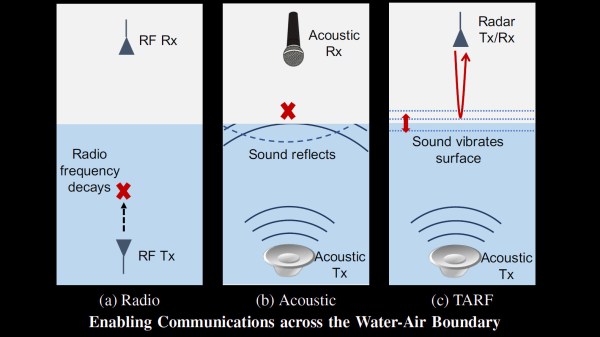
Detecting objects underwater isn’t an easy challenge, especially when things get murky and dark. Radio waves don’t propagate well, so most techniques rely on sound. Sonar is itself farily simple, simply send out a ping and listen for an echo, and that will tell you how far something is. Imaging underwater is significantly harder, because you would additionally need to know where each echo is coming from.
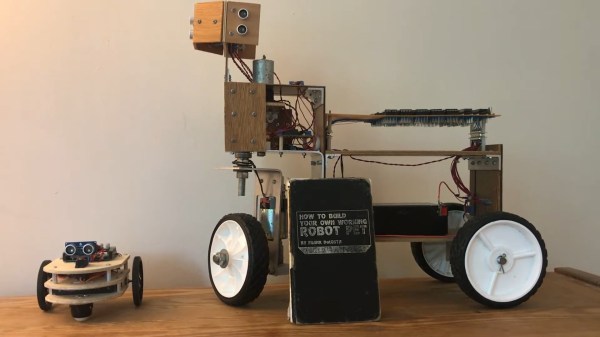
To answer the question of whether it is possible to put together an ultrasonic 3D imager that would cheaply enable anyone to image objects underwater, [Alec Vercruysse] and fellow team members at the Harvey Mudd College set out to create a system that does exactly that. You can read the presentation slides (PDF) or check out the entire project in the GitHub repository.
Continue reading “Supercon 2022: Alec Vercruysse Can See Through Murky Water”