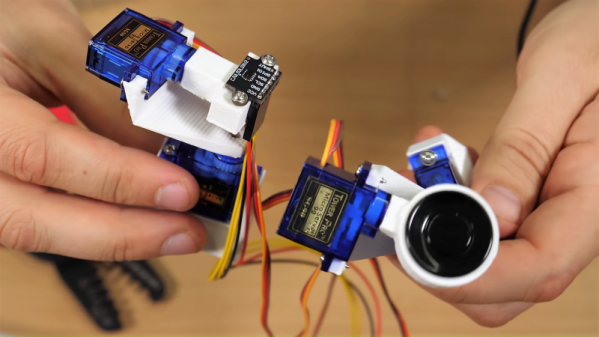
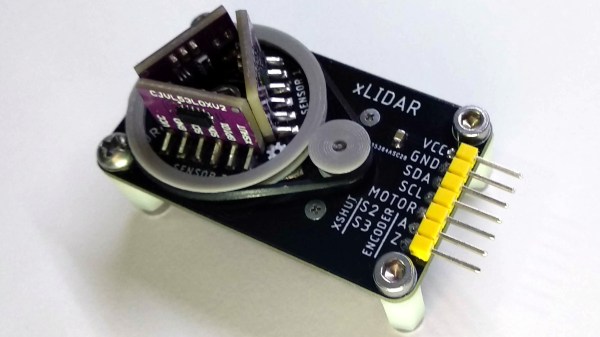
A lighthouse beams light out to make itself and its shoreline visible. [Daniel’s] lighthouse has the opposite function, using lasers to map out the area around itself. Using an Arduino and a ToF sensor, the concept is relatively simple. However, connecting to something that rotates 360 degrees is always a challenge.
The lighthouse is inexpensive — about $40 — and small. Small enough, in fact, to mount on top of a robot, which would give you great situational awareness on a robot big enough to support it. You can see the device in action in the video below. Continue reading “Lidar House Looks Good, Looks All Around”