The simple DC brushed motor is at the heart of many a robotics project. For making little toy bots that zip around the house, you can’t beat the price and simplicity of a pair of brushed motors. They’re also easy to control; you could roll your own H-bridge out of discrete transistors, or pick up one of the commonly used ICs like the L298N or L9110S.
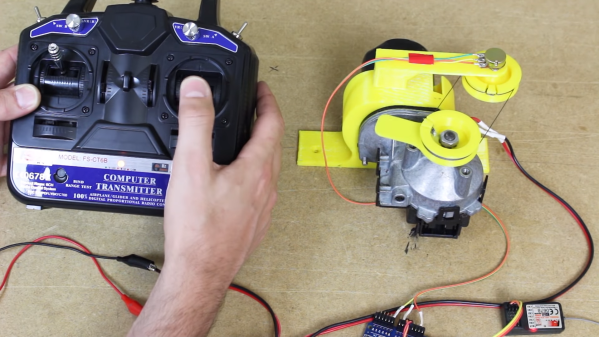
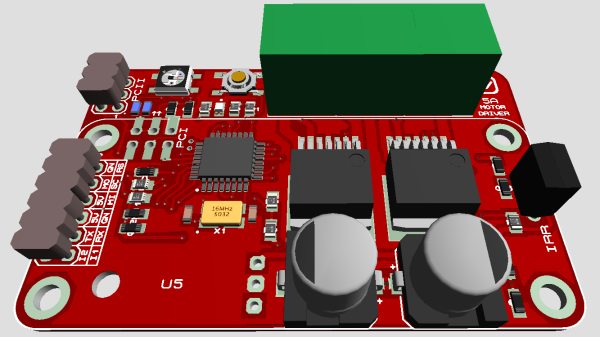
But what if you want an all-in-one solution? Something that will deliver enough current for most applications, drive dual motors, and deal with a wide range of input voltages. Most importantly, something that will talk to any kind of input source. For his Hackaday prize entry, [Praveen Kumar] is creating a dual brushed motor controller which can handle a multitude of input types. Whether you’re using an IR remote, a Pi communicating over I2C, an analog output or Bluetooth receiver, this driver can handle them all and will automatically select the correct input source.
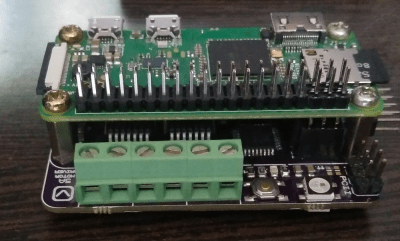
The board has an ATmega328p brain, so Arduino compatibility is there for easy reprogramming if needed. The mounting holes and header locations are also positioned to allow easy stacking with a Pi, and there’s a status LED too. It’s a great module that could easily find a place in a lot of builds.
If you need even more control over your brushed motor, you can soup up its capabilities by adding a PID loop for extra smarts.