Few occupations are more fraught with peril than predicting the future. If you are a science fiction author, it might not matter, but if you are trying to design the next game-changing piece of hardware, the stakes are higher.
It seems like, for the most part, even if you manage to get some of the ideas right, the form is often way off. Case in point: telemedicine. Today you can visit a doctor using video conferencing with your phone or a PC for many common maladies. A new idea? Not really. Hugo Gernsback wrote about it in Radio Electronics back in 1955.

Gernsback wrote:
The average medical doctor today is overworked and short-lived. There are never enough doctors anywhere for the world’s constantly multiplying population. Many patients die because the doctor cannot reach them in time, particularly at night and in remote regions.
…[H]e can only see a few [patients] during the day. With increasing traffic congestion, many doctors refuse to make personal calls — execept in emergencies. Even then they arrive often too late. Much of this dilemma will be archaic in the near future, thanks to the Teledoctor.
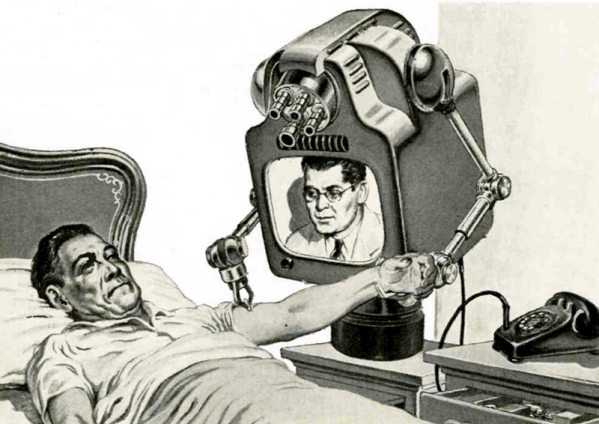
Gernsback envisioned a doctor using what we now call Waldos similar to what people use to manipulate radioactive material. These super mechanical hands (Gernsback’s words) would allow the doctor to write a prescription, pour liquids, or even diaper a baby thanks to a sense of touch built into them.
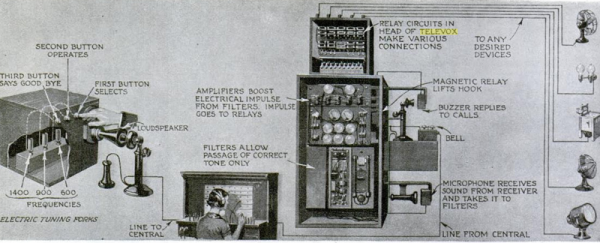
Oddly enough, Gernsback’s vision included renting a teledoctor from the drugstore for $3.50 a day. This way, the doctor could call on you and then follow up as well. The drug store would deliver the machine and it would — get this — connect to your phone:
A cord with the a telephone plug attached to the teledoctor instrument is now plugged into a special jack on your telephone. Future telephones will be provided with this facility. The TV signals and telehand electronic signals, etc., will all travel over the closed circuit telephone lines.
In a footnote, Gernsback notes that you can’t send a 525-line TV signal on current phone lines, but a 250-350 line picture was possible and that would be sufficient.
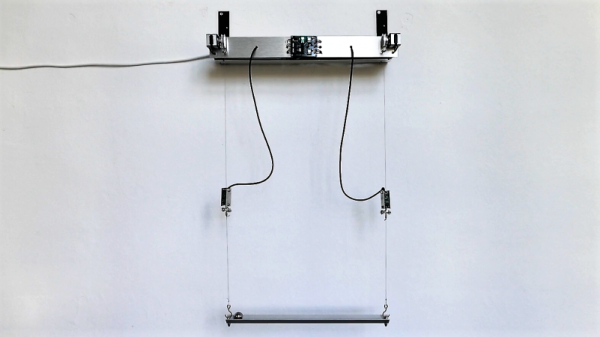
Visionary? In some ways, maybe. The basic idea is coming true today, although it isn’t likely doctors will do surgery or inject you remotely in your home anytime soon. The special telephone plug sort of came true and is already obsolete. The images, by the way, are the ones that accompanied the original article in Radio Electronics.
Continue reading “Retrotechtacular: Predictions That Just Missed It”