The household of [James Watts] has cats, and those cats have decided that various spots of carpet are just great for digging up with their claws. After some efforts at training the cats, [James] enlisted a robotic cat trainer with remote wireless sensors. The automated trainer does only one job, but it does that one job reliably and tirelessly, which is just what is needed in this case. A task like “automate training the cats to stop clawing the carpet” is really made up of many smaller problems, and [James] implemented a number of clever ideas in his solution.
First of all, the need for an automated solution has a lot to do with how pets form associations, and the need to have the negative reinforcement be in the right place at the right time to be effective. A harmless spritz of water in this case is used for correction and needed to be applied immediately, consistently, and “from out of nowhere” (instead of coming from a person.) Otherwise, as [James] discovered, spraying water when the cats clawed the carpet simply meant that they stopped doing it when he was around.
There were a number of tricky problems to solve in the process. One was how to reliably detect cats actually clawing the carpet. Another was how to direct the harmless spray of water to only the spot in question, and how to rig and manage a water supply without creating another mess in the process. Finally, the whole thing needed to be clean and tidy; a hackjob with a mess of wires strung everywhere just wouldn’t do.
 To achieve all this, [James] created a main sprayer unit that is wirelessly connected to remote sensor units using NRF24L01+ serial packet radios. When a remote senses that a trouble spot is being clawed, the main unit uses an RC servo to swivel a spray nozzle in the correct direction and give the offending feline a watery reminder.
To achieve all this, [James] created a main sprayer unit that is wirelessly connected to remote sensor units using NRF24L01+ serial packet radios. When a remote senses that a trouble spot is being clawed, the main unit uses an RC servo to swivel a spray nozzle in the correct direction and give the offending feline a watery reminder.
The self-contained remote sensors use an accelerometer to detect the slight lifting of the carpet when it’s being clawed. [James] programmed the MMA8452Q three axis accelerometer to trigger an external pin when motion is sensed above a certain threshold, and this event is sent over the wireless link.
For the main sprayer unit itself, [James] cleverly based it around an off-the-shelf replacement windshield washer tank. With an integrated pump, tubing, and assortment of nozzles there was no need to design any of those elements from scratch. If you want to give the project a shot, check out the github repository — probably worth it it since one night is all it took to change the cat behavior which explains the lack of any action video.
Pet projects usually center around automating the feeding process, but it’s nice to see other applications. For something on the positive-reinforcement end of training, check out this cat exercise wheel that integrates a treat dispenser to encourage an exercise regimen.
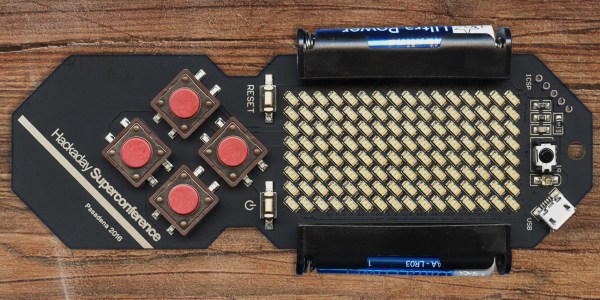
 Fast forward six months — here are the modifications made to the basic concept. First, the existing LED matrix, which was composed of two compact 8×8 blocks, was replaced by 128 discrete SMD LEDs. It was a much needed change to help scale down the dimensions and clunkiness, but also to avoid another painful experience of trying to purchase and have the matrix displays shipped, which seriously threatened the production of the previous badge.
Fast forward six months — here are the modifications made to the basic concept. First, the existing LED matrix, which was composed of two compact 8×8 blocks, was replaced by 128 discrete SMD LEDs. It was a much needed change to help scale down the dimensions and clunkiness, but also to avoid another painful experience of trying to purchase and have the matrix displays shipped, which seriously threatened the production of the previous badge. Motion and Expansion
Motion and Expansion