If you want to play with radar — and who could blame you — you can pretty easily get your hands on something like the automotive radar sensors used for collision avoidance and lane detection. But the “R” in radar still stands for “Radio,” and RF projects are always fraught, especially at microwave frequencies. What’s the radar enthusiast to do?
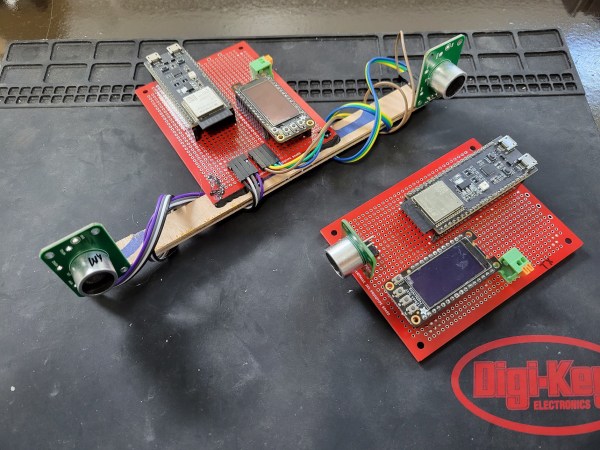
While it’s not radar, subbing in ultrasonic sensors is how [Dzl] built this sonar imaging system using a lot of radar principles. Initial experiments centered around the ubiquitous dual-transducer ultrasonic modules used in all sorts of ranging and detection project, with some slight modifications to tap into the received audio signal rather than just using the digital output of the sensor. An ESP32 and a 24-bit ADC were used to capture the echo signal, and a series of filters were implemented in code to clean up the audio and quantify the returns. [Dzl] also added a downsampling routine to bring the transmitted pings and resultant echoes down in the human-audible range; they sound more like honks than pings, but it’s still pretty cool.
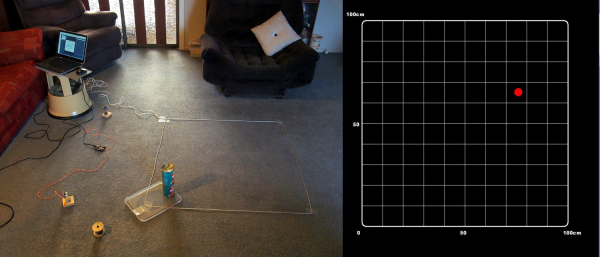
To make the simple range sensor more radar-like, [Dzl] needed to narrow the beamwidth of the sensor and make the whole thing steerable. That required a switch to an automotive backup sensor, which uses a single transducer, and a 3D printed parabolic dish reflector that looks very much like a satellite TV dish. With this assembly stuck on a stepper motor to swivel it back and forth, [Dzl] was able to get pretty good images showing clear reflections of objects in the lab.
If you want to start seeing with sound, [Dzl]’s write-up has all the details you’ll need. If real radar is still your thing, though, we’ve got something for that too.
Thanks to [Vanessa] for the tip.