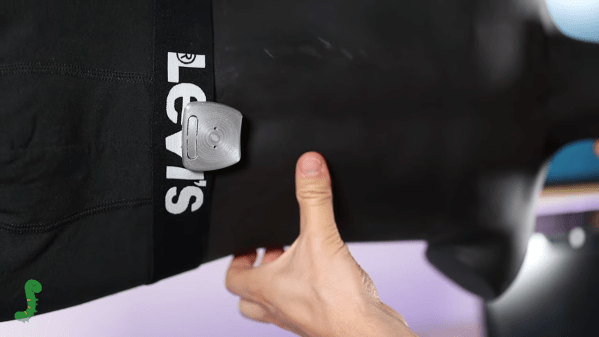
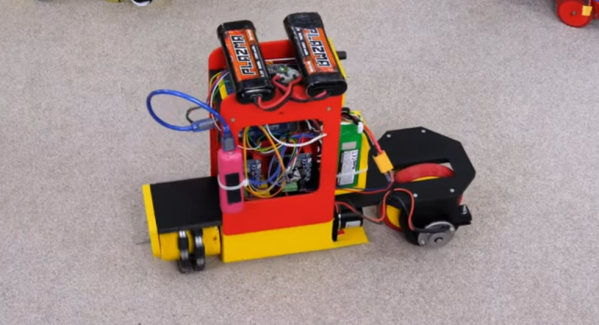
When self balancing scooters hit the market a few years ago they brought alongside them a range of machines, from the hoverboard kids toys which have provided so many useful parts, to the stand-astride electric unicycles. These last machines have a bulky battery and controller box atop the wheel, and [Dycus] set his sights on this by transferring it to a backpack with the vehicle’s IMU sensor relocated to one of the pedals.
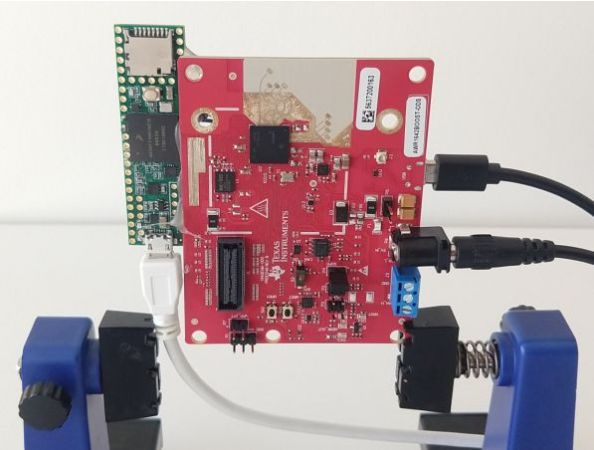
Such a job is not merely a simple case of rewiring with some longer cables, as a first challenge the IMU communicates via I2C which isn’t suitable for longer distances. This is solved by a chipset which places the I2C on a differential pair, but even then it’s not quite a case of stepping on and zipping about. The PID parameters of the balancing algorithm on a stock machine are tuned for the extra weight of the battery on top, and these needed to be modified. Fortunately there have been enough people hacking the STM microcontroller and firmware involved for this task to be achievable, but we’d rate it as still something not for the faint-hearted.
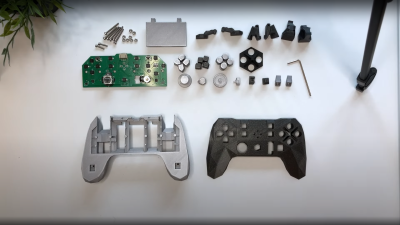
The final result can be seen in the video below, and the quality of the physical work shows as very high. The former battery box is repurposed into a stylish backpack, and though the newly minimalist foot pedals and wheel are a little less easy to get going he zips around with ease.
Hungry for more? This ain’t the first we’ve shown you.