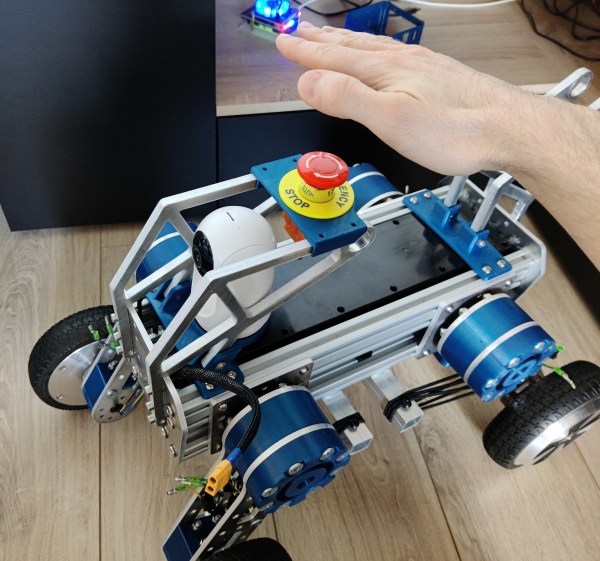
A recent tour of an old WWII-era aircraft carrier reminded us how hard navigation was before the advent of GPS. It used to be the work of skilled people to sight the sun or the stars and use giant books to figure out a vessel’s position. Now you just ask your phone to listen to some GPS satellites and you have precision undreamed of with other systems. But GPS sometimes isn’t enough. Just using conventional GPS, you can locate yourself to a couple of meters. The new L5 band, which isn’t on all satellites yet, can get you to about 30cm. But if you need better — up to around 1 or 2 cm — you need to use special techniques lumped together as GNSS enhancements. [Viktor] wanted to have an Arudino -based lawnmower, but wanted to use more conventional GPS techniques along with ultrawideband (UWB) ranging tags.
Given that the ranging anchors are in the mowing area, we aren’t sure why the mower even has GPS other than to geofence so you can’t start autonomous operations until you are in range of the tags. The three anchors are placed in a triangle, so if the robot knows the distance to each tag it can use some math to locate itself inside the area quite precisely.