Leaf blowers, the main instrument of the suburban Saturday symphony, are one of the most useful nuisances. It doesn’t take much work with a rake to convince even the most noise-averse homeowner to head to the Big Box Store to pick one up to speed lawn chores. Once you do buy one, and feel the thrust produced by these handheld banshees, you might wonder, If I let go of this thing, would it fly?
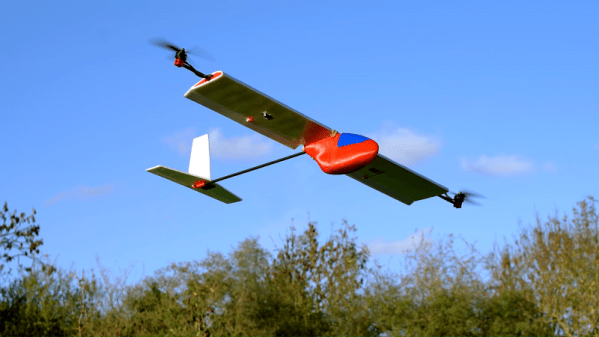
[Peter Sripol] had that very thought and set about building a couple of leaf blower powered planes to answer the question. It’s probably not a spoiler alert to report that the answer is no, but the video below is a fun watch anyway. The surprising thing is just how close both planes came to succeeding. The first plane was a stripped-down Ryobi two-stroke leaf blower suspended from a giant wing and tail section that very nearly got off the ground. Version 1.1 gained a retractable electric boost propeller – strictly for take-offs – and lost a lot of excess weight. That plane practically leaped into the air, but alas, servo problems prevented [Peter] from shutting down the electric and flying on Ryobi alone. Even a servo fix couldn’t save the next flight, which cratered right after takeoff. A version 2.0, this time using a brutally modified electric leaf blower, was slightly more airworthy but augured in several times before becoming unflyable.
What can we learn from all this? Not much other than it would take a lot of effort to make a leaf blower fly. We appreciate all of [Peter]’s hard work here, but we think he’s better off concentrating on his beautiful homebrew ultralight instead.