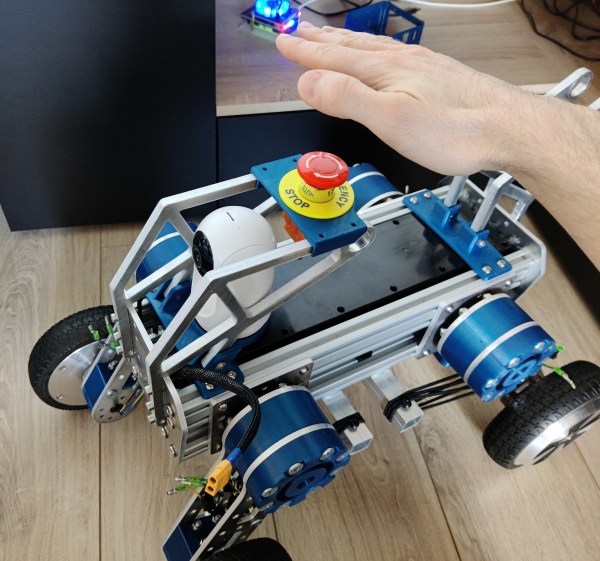
Since hoverboards were designed to move around fully grown humans, the motors have the torque to spare for this 25 kilogram (55 pound) rover. For rough terrain, each of the four motor/wheel combos is mounted to arms bolted together with 3D printed parts and thick laser-cut aluminum. Suspension is simple and consists of a couple of loops of bungee cord. The chassis uses aluminum extrusion bolted together with aluminum plates and more printed fittings.
It doesn’t look like the rover is running yet, but [Tanguy] intends to power it with an electric scooter battery and control it with his own Universal Robot Remote. He also added an E-stop to the top and a cheap indoor PTZ camera for FPV. We look forward to seeing the functional rover and how it handles terrain.
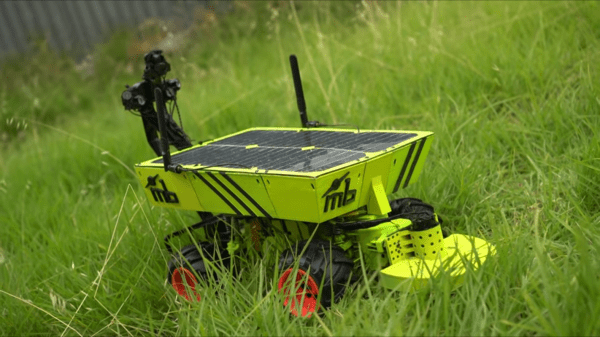
Interfacing technology and electronics with the real world is often fairly tricky. Complexity and edge cases work their way in to every corner of a project like this; just ask anyone who has ever tried to operate a rover on Mars, make a hydroponics garden, or build almost any robotics project. Even those of us who simply own a consumer-grade printer are flummoxed by the ways in which they can fail when manipulating single sheets of paper. This robotic lawnmower is no exception, driving its creator [TK] to extremes to get it to mow his lawn.
[TK] actually had a platform for his autonomous mower ready to go thanks to a previous build using this solar-powered robot to explore the Australian outback. Adding another motor to handle the grass trimming seemed simple at first and he set about wiring it all up and interfacing it to the robot. After the first iteration he found the robot was moving too fast to effectively cut the grass, so he added a more powerful cutting motor and a gearbox to help the mower crawl more slowly over the lawn. Disaster struck when his 3D printed mount for the steel cutting blades shattered, but with [TK] uninjured he pushed on with more improvements.
As it stands right now, the mower can effectively cut the grass moving forward even with the plastic-only cutting blades that [TK] is using now for safety reasons. The mower stripped its reverse gear so there still are some improvements to make before this robot is autonomously cutting the lawn without supervision. Normally we see lawnmowers retrofitted with robotics rather than robotics retrofitted with a lawnmower, but we’re excited to see any approach that lets us worry about one less household chore.
Since NASA’s Mariner spacecraft made the first up-close observations of Mars in 1964, humanity has lobbed a long line of orbiters, landers, and rovers towards the Red Planet. Of course, it hasn’t all been smooth sailing. History, to say nothing of the planet’s surface, is littered with Martian missions that didn’t quite make the grade. But we’ve steadily been getting better, and have even started to push the envelope of what’s possible with interplanetary robotics through ambitious craft like the Ingenuity helicopter.
Yet, after nearly 60 years of studying our frigid neighbor, all we have to show for our work boils down to so many 1s and 0s. That’s not to say the data we’ve collected, both from orbit and on the surface, hasn’t been extremely valuable. But scientists on Earth could do more with a single Martian rock than any robotic rover could ever hope to accomplish. Even still, not so much as a grain of sand has ever been returned from the planet’s dusty surface.
But if everything goes according to plan, that’s about to change. Within the next decade, NASA and the European Space Agency (ESA) hope to bring the first samples of Martian rocks, soil, and atmospheric gases back to Earth using a series of robotic vehicles. While it’s still unclear when terrestrial scientists should expect delivery of this interplanetary bounty, the first stage of the program is already well underway. The Perseverance rover has started collecting samples and storing them in special tubes for their eventual trip back to Earth. By 2028, another rover will be deployed to collect these samples and load them into a miniature rocket for their trip to space.
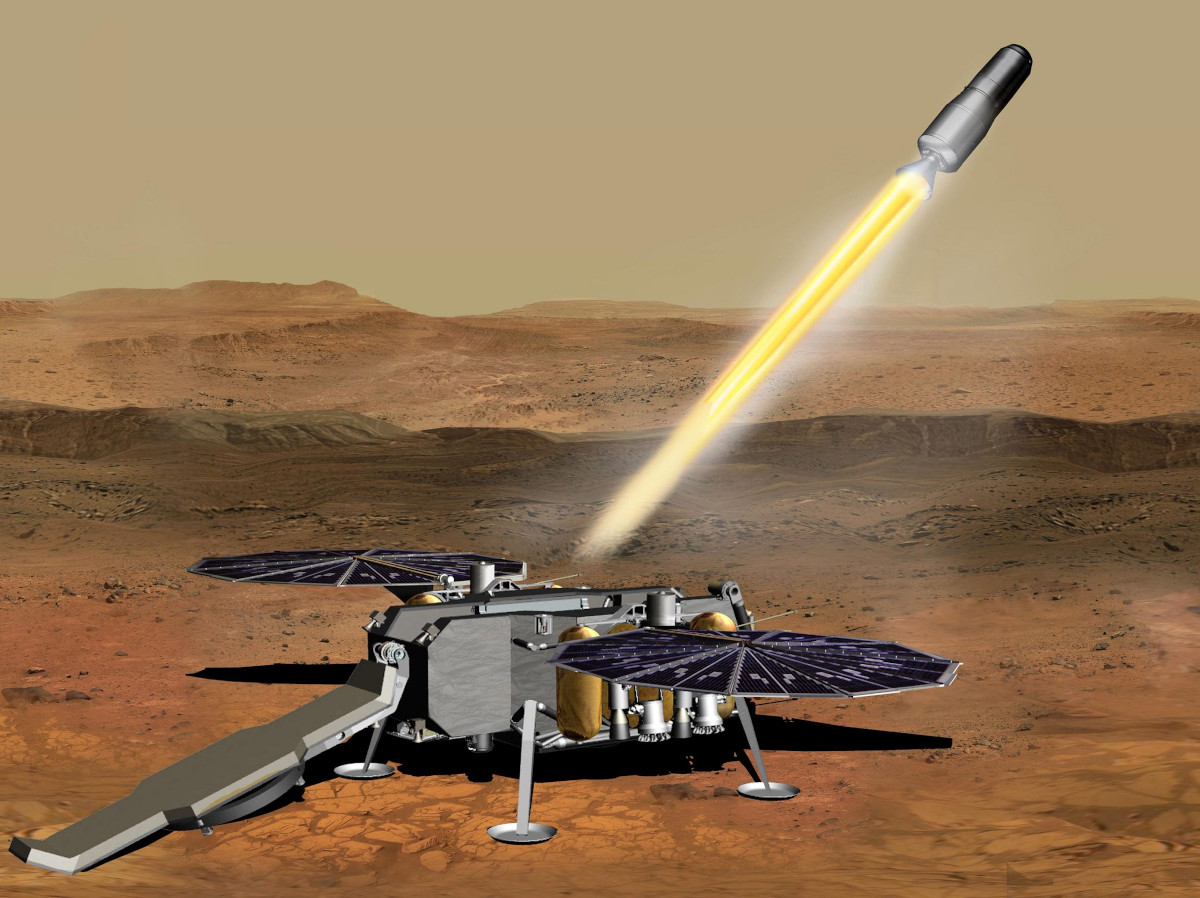
Launching the Mars Ascent Vehicle (MAV).
Just last week NASA decided to award the nearly $200 million contract to build that rocket, known officially as the Mars Ascent Vehicle (MAV), to aerospace giant Lockheed Martin. The MAV will not only make history as the first rocket to lift off from a celestial body other than the Earth, but it’s arguably the most critical component of the sample return mission; as any failure during launch will mean the irrevocable loss of all the samples painstakingly recovered by Perseverance over the previous seven years.
To say this mission constitutes a considerable technical challenge would be an understatement. Not only has humanity never flown a rocket on another planet, but we’ve never even attempted it. No matter what the outcome, once the MAV points its nose to the sky and lights its engines, history is going to be made. But while it will be the first vehicle to make the attempt, engineers and scientists have been floating plans for a potential Martian sample return mission for decades. Continue reading “NASA Taps Lockheed To Bring Back A Piece Of Mars”→
There are plenty of RC cars and robot platforms out there that you can buy. However, there’s an understanding that’s gained from building your own rover from the ground up. Which is precisely what [Alex] got from developing this compact 3D printed rover design.
The design is by no means fast; it’s intended more for crawling around “at a slow deliberate pace” as [Alex] puts it. Off-the-shelf 12 V gear motors are used to provide plenty of torque to get around. The modular design means that it can be built with just wheels, or set up with tracks fitted for additional performance in softer terrain. Skid steering is used to turn the platform.
Fitted with a Raspberry Pi Zero 2W, the rover can be controlled remotely over WiFi. A separate FPV camera and transmitter is then used to stream video remotely to pilot the bot. However, if you’re so inclined, you can probably use the Raspberry Pi to stream the video, too.
Good news from Jezero crater as the Mars rover Perseverance manages to accomplish for the first time what it was sent to do: collect and cache core samples from rocks. Space buffs will no doubt recall that Perseverance’s first attempt at core sampling didn’t go as planned — the rock that planetary scientists selected ended up being too soft, and the percussive coring bit just turned the core sample into powder. The latest attempt went exactly as planned: the cylindrical coring bit made a perfect cut, the core slipped into the sample tube nested inside the coring bit, and the core broke off cleanly inside the sample tube when it was cammed off-axis. Operators were able to provide visible proof that the core sample was retained this time using the Mastcam-Z instrument, which clearly shows the core in the sample tube. What’s neat is that they then performed a “percuss to ingest” maneuver, where the coring bit and sample tube are vibrated briefly, so that the core sample and any dust grains left around the sealing rim slide down into the sample tube. The next step is to transfer the sample tube to the belly of the rover where it’ll be hermetically sealed after some basic analysis.
Did any Android users perhaps oversleep this week? If you did, you’re not alone — lots of users of the Google Clock app reported that their preset alarms didn’t go off. Whether it was an actual issue caused by an update or some kind of glitch is unclear, but it clearly didn’t affect everyone; my phone mercilessly reminded me when 6:00 AM came around every day last week. But it apparently tripped up some users, to the point where one reported losing his job because of being late for work. Not to be judgmental, but it seems to me that if your job is so sensitive to you being late, it might make sense to have a backup alarm clock of some sort. We all seem to be a little too trusting that our phones are going to “just work,” and when they don’t, we’re surprised and appalled.
There seem to be two kinds of people in the world — those who hate roller coasters, and those who love them. I’m firmly in the latter camp, and will gladly give any coaster, no matter how extreme, a try. There have been a few that I later regretted, of course, but by and large, the feeling of being right on the edge of bodily harm is pretty cool. Crossing over the edge, though, is far less enjoyable, as the owners of an extreme coaster in Japan are learning. The Dodon-pa coaster at the Fuji-Q Highland amusement park is capable of hitting 112 miles (180 km) per hour and has racked up a sizable collection of injuries over the last ten months, including cervical and thoracic spine fractures. The ride is currently closed for a safety overhaul; one has to wonder what they’re doing to assess what the problem areas of the ride are. Perhaps they’re sending crash test dummies on endless rides to gather data, a sight we’d like to see.
And finally, you may have thought that phone phreaking was a thing of the past; in a lot of ways, you’d be right. But there’s still a lot to be learned about how POTS networks were put together, and this phone switch identification guide should be a big help to any phone geeks out there. Be ready to roll old school here — nothing but a plain text file that describes how to probe the switch that a phone is connected just by listening to things like dial tones and ring sounds. What’s nice is that it describes why the switches sound the way they do, so you get a lot of juicy technical insights into how switches work.
Computer engineering student [sherwin-dc] had a rover project which required streaming video through an ESP32 to be accessed by a web server. He couldn’t find documentation for the standard camera interface of the ESP32, but even if he had it, that approach used too many I/O pins. Instead, [sherwin-dc] decided to shoe-horn a video into an I2S stream. It helped that he had access to an Altera MAX 10 FPGA to process the video signal from the camera. He did succeed, but it took a lot of experimenting to work around the limited resources of the ESP32. Ultimately [sherwin-dc] decided on QVGA resolution of 320×240 pixels, with 8 bits per pixel. This meant each frame uses just 77 KB of precious ESP32 RAM.
His design uses a 2.5 MHz SCK, which equates to about four frames per second. But he notes that with higher SCK rates in the tens of MHz, the frame rate could be significantly higher — in theory. But considering other system processing, the ESP32 can’t even keep up with four FPS. In the end, he was lucky to get 0.5 FPS throughput, but that was adequate for purposes of controlling the rover (see animated GIF below the break). That said, if you had a more powerful processor in your design, this technique might be of interest. [Sherwin-dc] notes that the standard camera drivers for the ESP32 use I2S under the hood, so the concept isn’t crazy.
We’ve covered several articles about generating video over I2S before, including this piece from back in 2019. Have you ever commandeered a protocol for “off-label” use?
There’s a military adage that no plan survives first contact with the enemy. While we haven’t gone to war with Mars, at least not yet, it does seem to be a place where the best-laid scientific plans are tested in the extreme. And the apparent failure of Perseverance to retrieve its first Martian core sample is yet another example of just how hard it is to perform geotechnical operations on another planet.
To be sure, a lot about the first sampling operation went right, an especially notable feat in that the entire process is autonomous. And as we’ve previously detailed, the process is not simple, involving three separate robotic elements that have to coordinate their operations perfectly. Telemetry indicates that the percussive drill on the end of the 2.1 m robotic arm was able to use its hollow coring bit to drill into the rock of Jezero crater, and that the sample tube inside the coring bit was successfully twisted to break off the core sample.
But what was supposed to happen next — jamming of the small core sample inside the sample tube — appears not to have happened. This was assessed by handing the sample tube off to the Sample Handling Arm in the belly of Perseverance, where a small probe is used to see how much material was recovered — none, in this case. NASA/JPL engineers then began a search for the problem. Engineering cameras didn’t reveal the core sample on the Martian surface, meaning the sample handling robots didn’t drop it. The core sample wasn’t in the borehole either, which would have meant the camming mechanism designed to retain the core didn’t work. The borehole, though, looked suspicious — it appears not to be deep enough, as if the core sample crumbled to dust and packed into the bottom of the hole.
If this proves to be the cause of the failure, it will be yet another example of Martian regolith not behaving as expected. For InSight, this discovery was a death knell to a large part of its science program. Thankfully, Perseverance can pick up and move to better rock, which is exactly what it will be doing in September. They still have 42 unused sample tubes to go, so here’s to better luck next time.